BECKHOFF DK9222-0610-0027 User Manual
Page 2
I/O
Motion
Application Note DK9222-0610-0027
Servo motors are suitable drives for position control applications. They combine motor, speed and angular position measuring
systems. For cost-sensitive applications with low dynamics, stepper motors may be used as an alternative. In the lower capacity
range, DC motors offer good control ability with low costs. The suitability of a drive is judged on the basis of the torque
produced and the dynamics.
Motion Control in a very compact form factor
The modular I/O system from Beckhoff also encompasses Motion Control in an exceptionally compact form factor. Motors are
driven directly from the PLC with output stages for servo, stepper and DC motors. To have an output stage means that the
motor amplifier is built right into the motor terminal. Whether using an EtherCAT or a Bus Terminal, these I/O devices with
a built in drive can be integrated into any control environment using Beckhoff Bus Couplers. The TwinCAT System Manager
reduces familiarization efforts to a minimum, since TwinCAT enables equal treatment of all motors on the software side. The
interfaces are almost identical, and parameterization is quite straightforward.
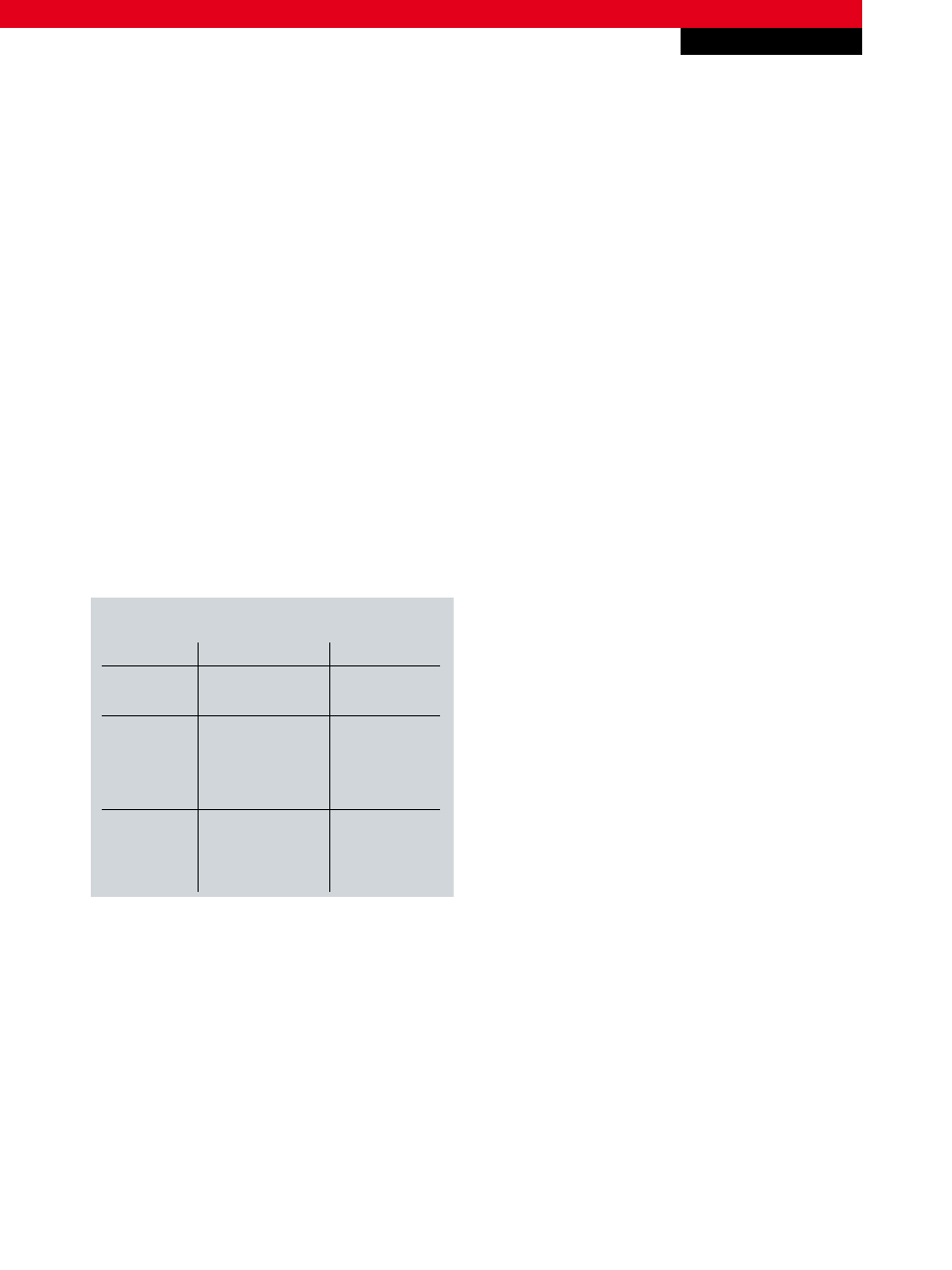
Overview of Motion Control terminals
EtherCAT Terminals Bus Terminals
Servomotors
EL7201
50 V DC, 4 A
–
DC motors
Stepper motors
EL7332
24 V DC, 1 A
EL7342
50 V DC, 3.5 A
EL7031
24 V DC, 1.5 A
EL7041
50 V DC, 5 A
KL2532
24 V DC, 1 A
KL2552
50 V DC, 5 A
KL2531
24 V DC, 1.5 A
KL2541
50 V DC, 5 A
Fig. 1 Overview of the Motion Control terminals
DC, servo and stepper motors (principle of operation)
The principles of operation for DC motors and stepper motors are fundamentally different. DC motors generate a torque and a
rotary motion when a voltage is applied. Stepper motors only generate a torque. A prerequisite for the rotary motor motion is
commutation of the current, i.e. inversion of the direction of current flow in the electromagnetic coil during a motor rotation.
DC motors with brushes are self-commutating. Stepper motors cannot commutate independently. Servo motors do not differ
from the aforementioned types of motors in their physical operating principle, but rather in the way they are controlled: they
are operated in conjunction with position feedback in a closed control loop.
New Automation Technology
Beckhoff
2
For application notes see disclaimer on the last page