Communications timing, Command messages from master to drive, 9communications timing – Yaskawa BACnet MS/TP User Manual
Page 31
9
Communications Timing
To prevent a communications overrun in the slave drive, the master should wait a certain time
between sending messages to the same drive. In the same way, the slave drive must wait before
sending response messages to prevent an overrun in the master. This section explains the
message timing.
u
Command Messages from Master to Drive
The master must wait for a specified time between receiving a response and resending the
same type of command to the same slave drive to prevent overrun and data loss. The minimum
wait time depends on the command as shown in
.
Table 9 Minimum Wait Time for Sending Messages
Command
Type
Example
Minimum Wait Time
1
• Control command (Run, Stop)
• Set inputs/outputs
• Read monitors and parameter values
5 ms
<1>
2
Write parameters
H5-11 = 0: 50 ms
H5-11 = 1: 200 ms
<1>
3
Save changes using an Enter command
200 ms to 2 s, depending on
the number of parameters that
were changed
<1>
4
Enter with storage to drive EEPROM after
initialization
5 s
<1>
If the drive receives command type 1 data during the minimum wait time, it will perform the command and then
respond. However, if it receives a command type 2 or 3 during that time, either a communication error will result
or the command will be ignored.
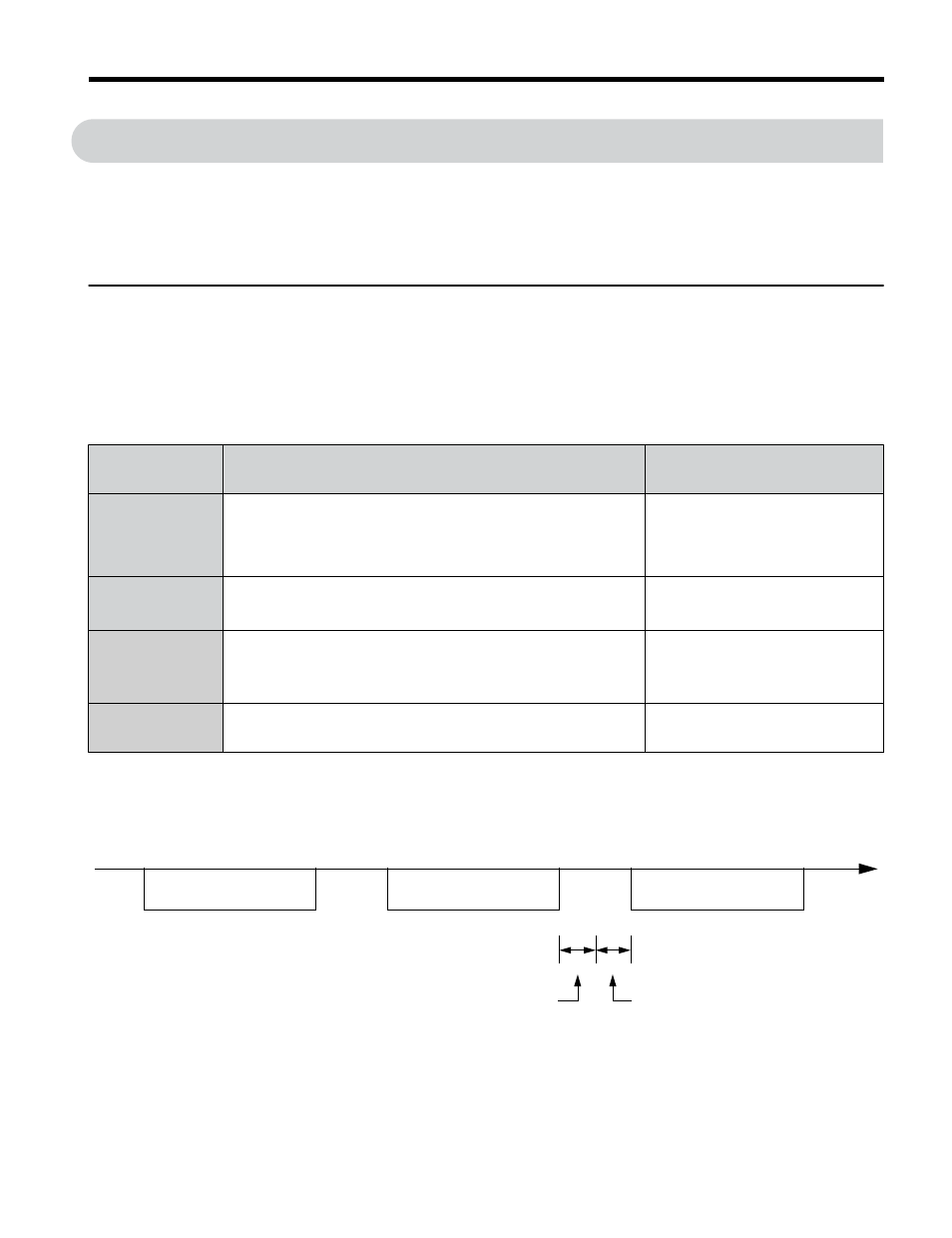
Command message
Response message
Command message
PLC→Drive
PLC→Drive
Drive→PLC
24 bit length
Master Send
Wait Time
Time
Figure 12 Minimum Wait Time for Sending Messages
9 Communications Timing
YASKAWA TOEP YEACOM 08A A1000 Option BACnet MS/TP SI-B3 Installation & Technical Manual
31