40 (2) absolute encoder – Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors - Analog Voltage and Pulse Train Reference User Manual
Page 91
3 Wiring and Connection
3.5.2 Encoder Connection Examples
3-40
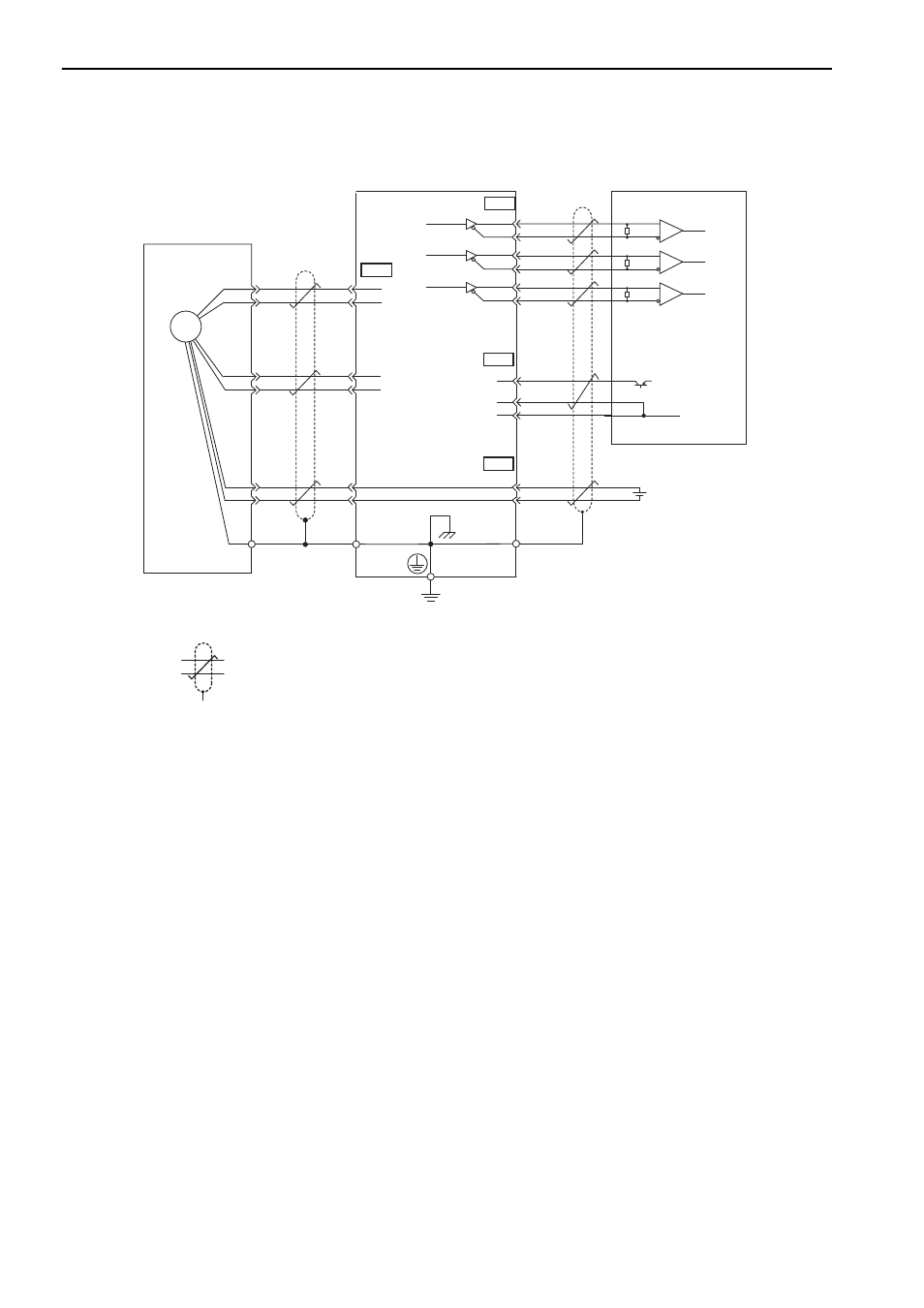
(2) Absolute Encoder
∗1. The pin arrangement for wiring connectors varies in accordance with the servomotor that is used.
∗2.
: represents shielded twisted-pair wires.
∗3. When using an absolute encoder, provide power by installing an encoder cable with a JUSP-BA01-E Battery Case or
install a battery on the host controller.
/PCO
ENC
3
4
4
2
SG
SEN
21
22
BAT
BAT
(+)
(-)
CN2
33
34
35
36
19
20
CN1
SG
1
PA O
/P AO
PBO
/PBO
PCO
CN1
CN1
0 V
+5 V
+
-
5
6
1
2
PG5 V
PG0 V
PS
/PS
BAT(+)
BAT(-)
R
R
R
Absolute encoder
(Shell)
SERVOPACK
Phase A
Phase B
Phase C
Connector
shell
Connector
shell
∗2
∗3
∗2
∗1
Phase
A
Phase
B
Phase
C
Host controller
Battery
Output line-driver SN75ALS174
or the equivalent
R (terminating resistance): 220 to 470
Ω
Applicable line receiver: SN75ALS175 or MC3486
manufactured by Texas
Instruments, or the equivalent
45