Positioning, The positioning system – BECKHOFF AL2000 User Manual
Page 10
Eiserstraße 5 / D-33415 Verl / Telefon 05246/963-0 / Telefax 05246/963-149
10
3. Positioning
The positioning system
Linear motor applications require a sophisticated position and velocity feedback. A linear encoder and a servo-
controller are taken up in the positioning system. The position of the slide is detected by a ruler-probe combina-
tion. The linear encoder returns this information to the servocontroller.
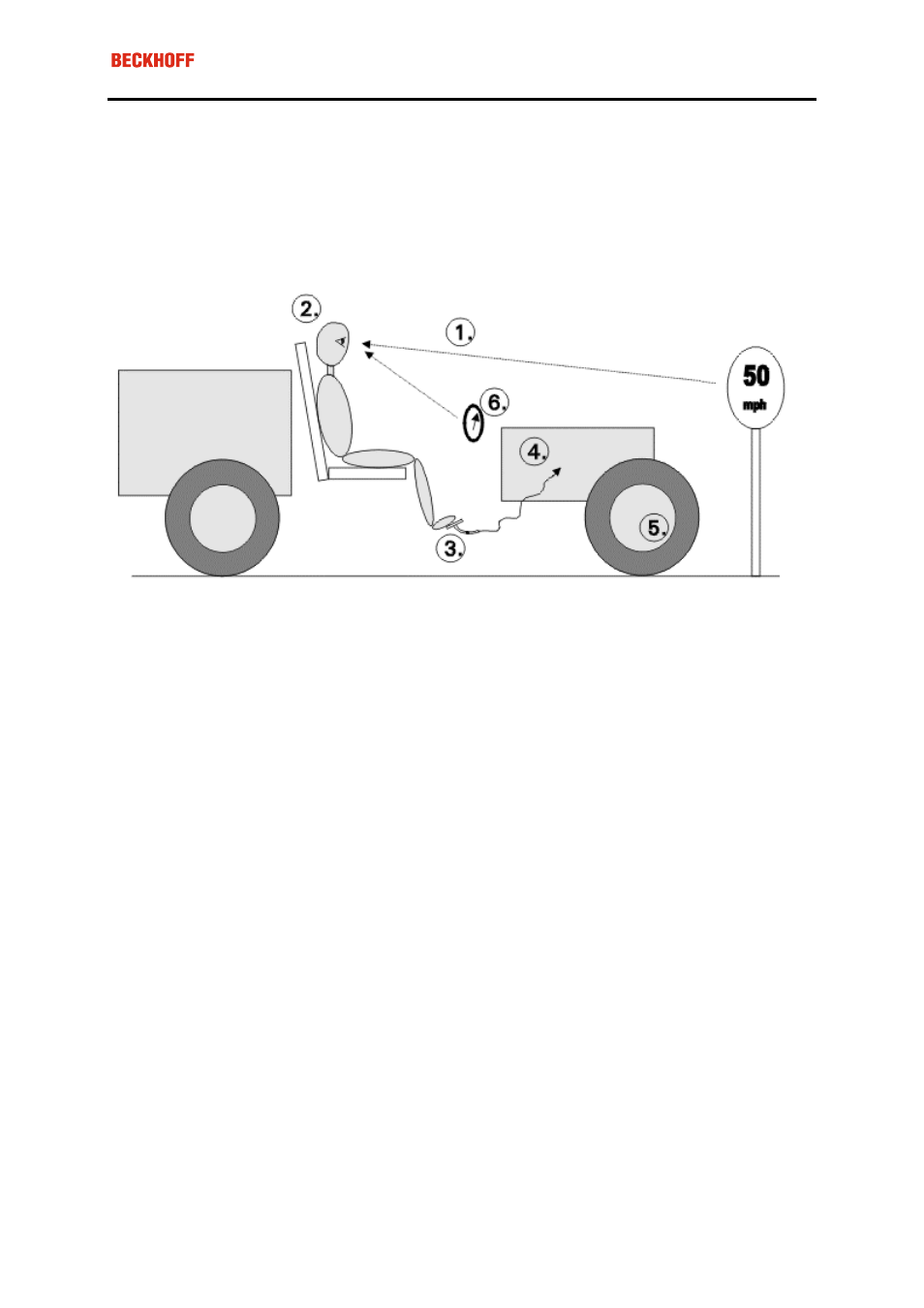
To have some impression of the positioning system a superficial comparison could be made with the speed
control of an automobile. The information of the traffic sign (1) is detected and interpreted by the driver (2) and
translated into an adjustment of the gaspedal (3). This results in an adjustment of the motor force (4) and con-
sequently of the rotation speed of the wheels (5). The actual speed information is returned to the driver by the
speedometer (6). As long as the desired speed is not gained this specific loop back situation is maintained.
What a linear motor system concerns the measurement unit could be compared with the driver’s visual system.
The measurement probe detects the position and the linear encoder translates it into the right position informa-
tion. The imput ports of the servo-controller act like the eye-nerves. Here the position information is returned to
the drivers brains, the very servo-controller. In the controller this information is processed and translated into an
appropriate voltage signal to the linear motor, comparable with the gas pedal movement. Because the linear
motor needs a powerful input this signal is provided by an amplifier. A bigger amplifier supplies a larger peak
force, just like a more powerful car engine produces more horse powers. Comparable with car dynamics the
acceleration of a linear motor depends on the ratio of the amplifier power and the total moving load. It should be
notified that the voltage signal to the linear motor is provided in the form of pulses with a fixed switching fre-
quency and a fixed voltage. So the pulse width is the parameter to be regulated.
The position information provided by the probe is incremental. So the linear motor has to do without the abso-
lute position of the slide. Especially when starting a motor operation this could be problematical. Herefore the
slide is activated to some minimal testmovement. This ‘magnetic alignment’ supplies the positioning system
with the required information.