Flowserve Valtek Beta Positioners for Control Valves User Manual
Page 3
24-3
Flowserve Corporation, Valtek Control Products, Tel. USA 801 489 8611
A decrease in the instrument signal reverses the de-
scribed actions causing a proportional downward move-
ment of the actuator piston and stem.
The spool has a close tolerance to the block and a small
amount of air, 0.3 SCFM, will exhaust at the null, or
equilibrium, position. This air consumption is normal.
I/P Module Operation
The I/P module receives a 30-150 psi air supply pres-
sure from the Beta positioner and converts it to a 3-15 psi
output signal. This signal is proportional to a 4-20 mA
input signal or a 10-50 mA input signal depending on the
model used.
The supply pressure from the Beta Positioner is filtered
as it passes through a field-replaceable, coalescing filter
element in the module. Next it passes through an
internal pressure regulator that regulates it to approxi-
mately 22 psi. The air then goes through an orifice that
restricts the flow and air consumption.
The air is further controlled to 3-15 psi using a spring-
diaphragm flapper that is attracted by an electromagnet
to a nozzle. A temperature compensated piezoresistive
pressure sensor mounted on a circuit board senses the
I/P output pressure. The pressure sensor and circuitry
create a feedback loop, which determines how much
current to send to the electromagnet for a desired
pressure output. The electromagnet in the feedback
loop varies the nozzle-flapper spacing, which regulates
the I/P output pressure to 3-15 psi proportional to the
4-20 (or 10-50 mA) input signal.
When these opposing forces balance exactly, the sys-
tem will be in equilibrium and the stem will be in the
position called for by the instrument signal. If these
opposing forces are not in balance, the summing beam
will move up (or down) and, by means of the spool valve,
will change the output pressures and flow rate. This will
cause the piston to move until tension on the feedback
spring equalizes with the instrument signal pressure.
The detailed sequence of positioner operations are as
follows: An increase in the instrument signal forces the
instrument signal capsule and summing beam down-
ward. This motion of the summing beam also pulls the
pilot valve spool downward from its equilibrium position.
This opens the pilot valve ports, supplying air to port 1
and exhausting air from port 2. This causes the actuator
piston to move upward.
This upward motion of the piston is transmitted back to
the positioner through the feedback linkage and cam
resulting in the spring being stretched proportionally to
the valve position. The piston continues to stroke up-
ward until the force in the feedback spring increases
sufficiently to counter the force generated by the instru-
ment signal capsule. At this point, the summing beam
and spool begin to return to their equilibrium position.
As the valve spool ports start to close, the air flow rate
to the actuator is decreased.
After the piston has reached the required position, the
feedback spring tension force will equal the force gen-
erated in the instrument signal capsule. The summing
beam and instrument signal capsule will remain in their
equilibrium positions with no air flowing to the actuator
until a change in the instrument signal is made.
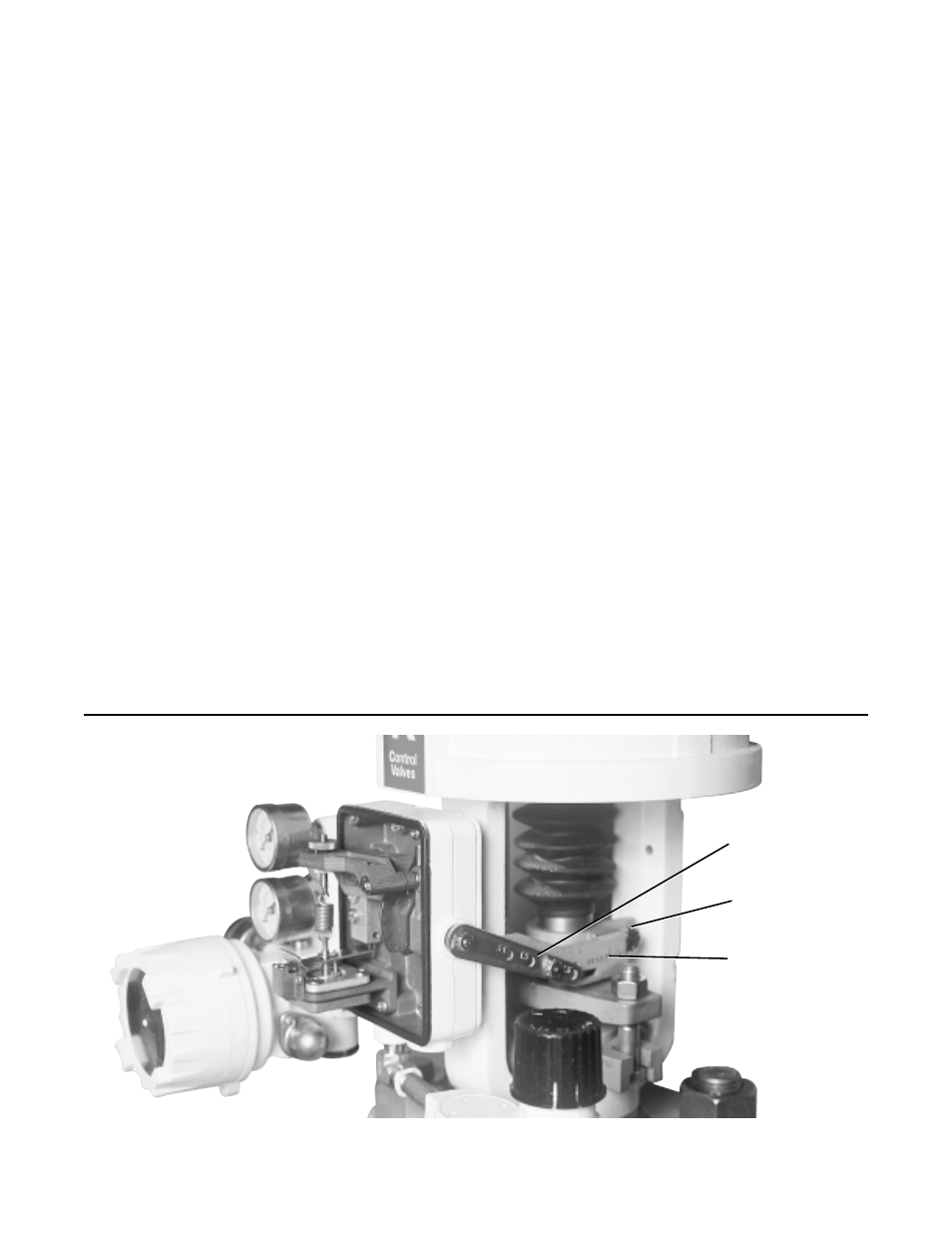
Figure 3: Positioner Mounted on Mark One with Linear Actuator
Follower Arm
Stem Clamp
Take-off Arm