Serial output specification – MicroE 3500Si Mercury User Manual
Page 14
Serial Output Specification
Page 12
Introduction
Historically, the method of choice for many optical position feedback systems has been A quad B (Quadrature) output. The limitation of this method
is output speed, especially when the interpolation level is large. When the optical sensor speed is fast and/or the interpolation multiplier is large,
the Quadrature output frequencies will be extremely high and out of the range of the Quadrature counters of most standard motion controllers.
This limitation can be avoided by sending the position information in parallel format or in a serial word format.
The parallel formats are cumbersome to cable (especially wide word lengths) and are more susceptible to noise interference.
Therefore, a serial data word format is the data communication method of choice.
The SS350SI Interpolator has the ability to output a position word in a serialized format. This allows very fast communication between an interpo-
lator and customer application. The speed limitation of the Quadrature format is thus eliminated.
Signal Description
The interface to the SS350SI Interpolator uses the following signals to implement serial communication, n_spiEnable (n_CS), spiDataOut (SDO),
spiClockIn (SCK), and optionally spiClockOut (SCF).
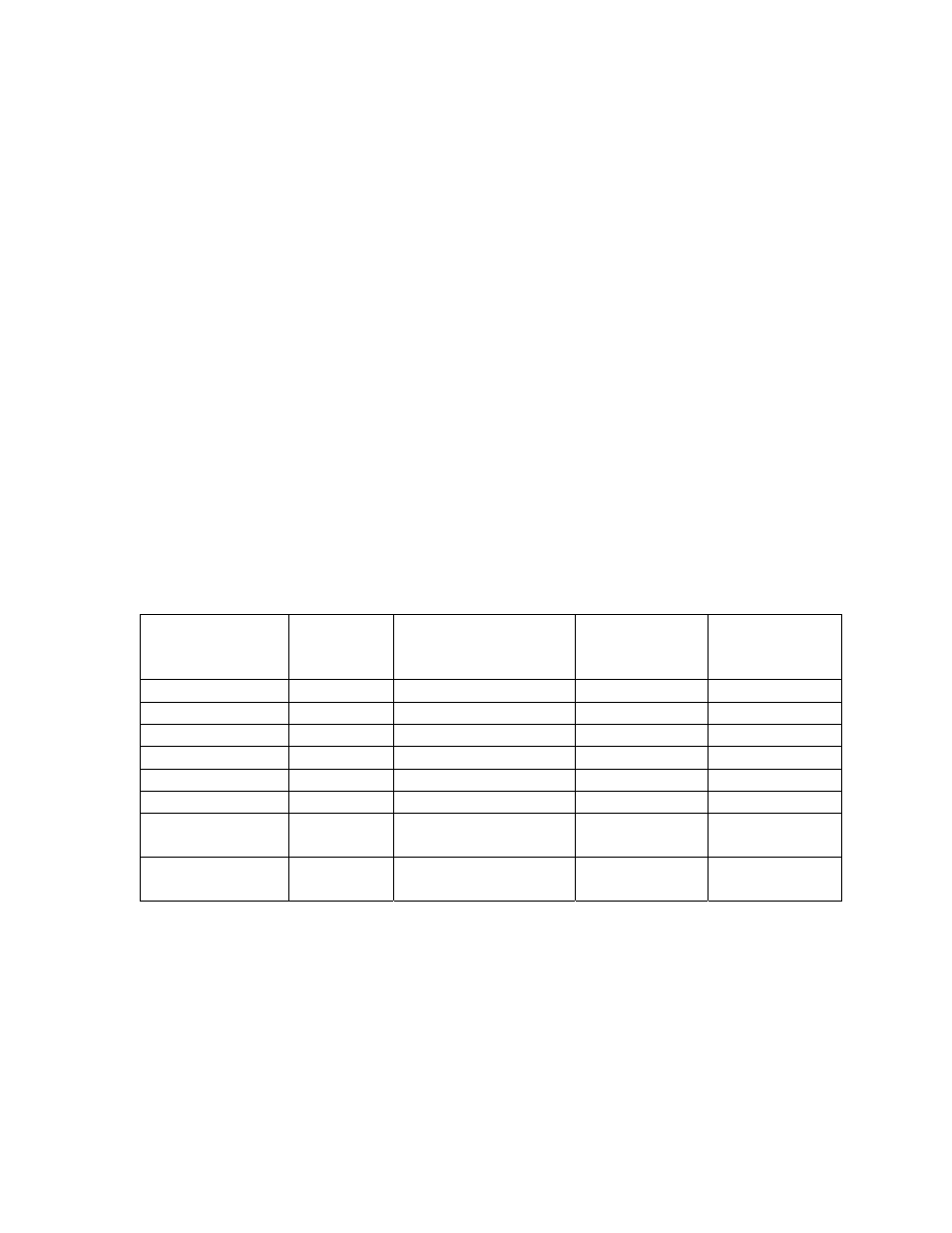
Each signal is differential and RS-422 compatible. See table for interpolator signal names, pin names, and pin locations:
Signal Name
Pin Name
Function
I/O
Interpolator
referenced
15 Pin HD
Connector
Pin Number
n_spiEnable
n_CS+
Chip Select+
Input
7
n_CS-
Chip Select-
Input
8
spiClockIn
SCK+
Serial Clock+
Input
14
SCK-
Serial Clock-
Input
15
spiDataOut
SDO+
Serial Data Output+
Output
5
SDO-
Serial Data Output-
Output
4
spiClockOut
SCF+
Serial Clock
Feedback+
Output
10
SCF-
Serial Clock
Feedback-
Output
9