Data transfer, function – BECKHOFF KL5051 User Manual
Page 13
Data transfer, function
KL5051
13
Data transfer, function
Communication with the servo amplifier takes place via the process data
(A0-A5, E0-E5). A0/E0 is the control/status byte for operating data com-
munication and A3/E3 is the control/status byte for parameter and servo
status communication with the device.
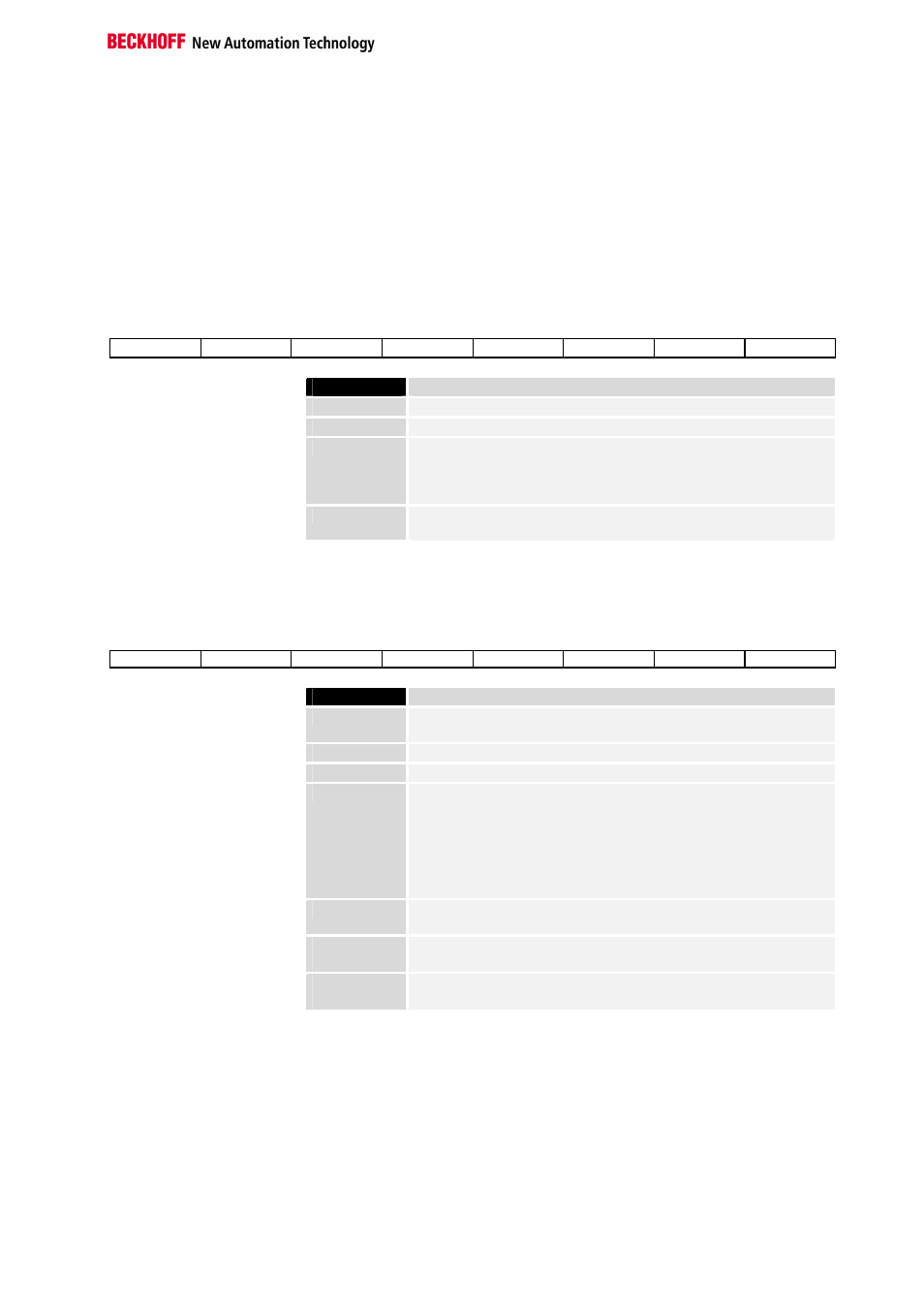
Operating data status byte
E0
The operating data status byte outputs possible error messages of the
servo amplifier during process data exchange.
MSB
REG=0
ERROR
ALARM
KOM_ERR
CRC_ERR
Bit
ERROR
Is set when ALARM or KOM_ERR is set.
ALARM
The alarm bit of the servo amplifier is inserted here.
KOM_ERR
A communication disturbance has occurred. No valid data is
being exchanged. Possible causes: the servo interface is not
ready or is deenergised, a wire breakage has occurred or the
connecting leads of the terminal have been swapped.
CRC_ERR
Invalid telegrams are occurring during data transfer (possibly
EMC problem).
Parameter control byte A3
when setting the servo
control
(Bit 7 = 0)
Various actions are executed in the servo amplifier with this control byte.
MSB
REG=0
RD_PARH
RD_PARL
RS_ANS
RF
/NSTOP
/PSTOP
Bit
REG
This bit switches bewtween the servo parameters and servo
control/status communication.
RD_PARH
Read Parameter High Word (parameter address in A4)
RD_PARL
Read Parameter Low Word (parameter address in A4)
RS_ANS
Reset of response monitoring or of the following error. If the ser-
vo signals an error, response monitoring has occurred, for e-
xample, and the error can be reset by setting this bit. If the error
message is not cancelled in the status byte E3 (SERV_ERR)
(e.g. interior temperature too high), the servo amplifier must be
deenergised (the other error messages can only be reset in this
way).
RF
Controller enabling. The output stage is enabled and, at the sa-
me time, the brake (if available) is enabled.
/NSTOP
(active low)
Negative setpoints are set to the setpoint zero.
/PSTOP
(activw low)
Positve setpoints are set to the setpoint zero.
Parameter status byte E3
when detecting the servo
status
The activated servo status word is read continuously by the servo and up-
dated.