BECKHOFF KL5051 User Manual
Page 14
Data transfer, function
14
KL5051
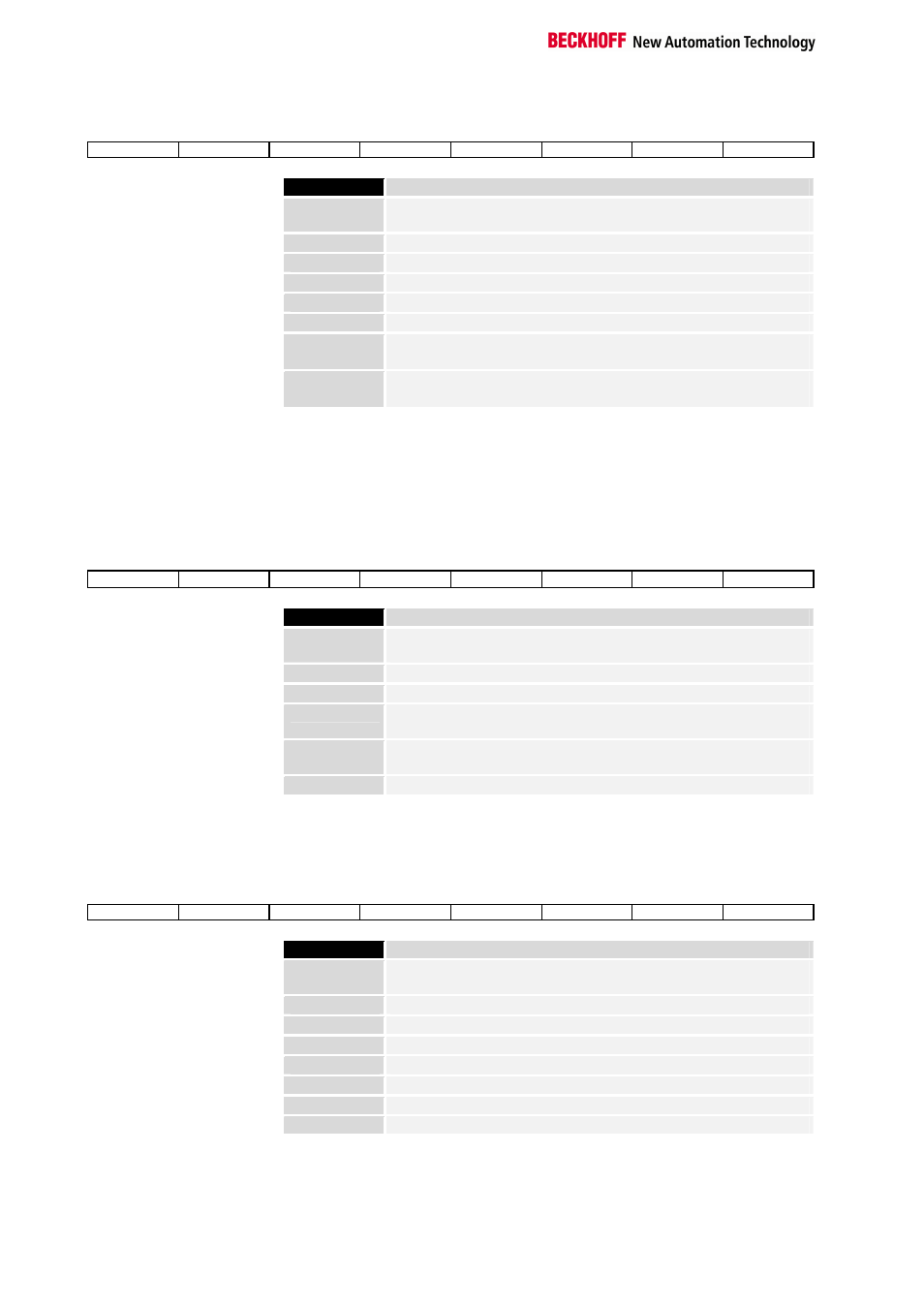
MSB
REG=0
KOM_ERR
RD_PARH_Q RD_PARL_Q
SERV_ERR
RF_Q
/NSTOP_Q
/PSTOP_Q
Bit
REG
0: the channel consisting of A3,A4,A5,E3,E4,E5 is in the opera-
ting mode with which the servo control/status is operated.
KOM_ERR
A data transfer error has occurred.
RD_PARH_Q
The high word of the requested parameter value is in E4,E5.
RD_PARL_Q
The low word of the requested parameter value is in E4,E5.
SERV_ERR
The servo amplifier's power section is signalling an error.
RF_Q
The output stage and, if available, the brake are enabled.
/NSTOP_Q
(aktiv low)
1: negative sepoints are possible.
0: negative sepoints are set to zero.
/PSTOP_Q
(aktiv low)
1: positive sepoints are possbile.
0: positive setpoints are set to zero.
Parameter control byte A3
in the mode parameter
(Bit 7 = 1)
The parameter data is written into a buffer with the parameter address and
is transferred to the servo on request. This request can take place with the
last buffer entry. The terminal generates the data frame and checks and
evaluates the checksum. The parameter consists of up to one double work,
but shorter parameter data can also be sent.
MSB
REG=1
RD_PARH
RD_PARL
PUT_HW
PUT_LW
TRS_BUFF
Bit
REG
This bit switches between servo parameter and servo con-
trol/status communication.
RD_PARH
Read Parameter High Word (parameter address in A4)
RD_PARL
Read Parameter Low Word (parameter address in A4)
PUT_HW
Write high word of the parameter into buffer (A4, A5 parameter
high word).
PUT_LW
Write low word of the parameter into buffer (A4, A5 parameter
high word).
TRS_BUFF
Write data from buffer to parameter address defined by A4.
Parameter status byte E3
in the mode parameter
During parameter communication (REG=1) with the servo, various acknow-
ledgemnets are output in the status byte
MSB
REG=1
KOM_ERR
RD_PARH_Q RD_PARL_Q
SERV_ERR
PUT_HW_Q
PUT_LW_Q
TRS_BUF_Q
Bit
REG
1: the channel consisting of A3,A4,A5,E3,E4,E5 is in the mode
with which parameter communication is taking place.
KOM_ERR
A data transfer error has occurred.
RD_PARH_Q
The high word of the requested parameter value is in E4,E5.
RD_PARL_Q
The low word of the requested parameter value is in E4,E5.
SERV_ERR
The power section of the servo is signalling an error.
PUT_HW_Q
The high word has been written into the buffer.
PUT_LW_Q
The low word has been written into the buffer.
TRS_BUF_Q
Data has been transferred successfully.