4 electronic gear – Yaskawa Σ-V Series AC Servo Drives Rotational Motor Analog Voltage Reference User Manual
Page 114
5 Operation
5.4.4 Electronic Gear
5-34
5.4.4
Electronic Gear
The electronic gear enables the workpiece travel distance per reference pulse input from the host controller.
The minimum unit of the position data moving a load is called a reference unit.
Note: If the multiplier of the input reference pulse is switched, the input reference pulse from the host controller will be
multiplied by n and defined as the reference unit of the position data. ("n" is the multiplier of the reference pulse.)
When the Electronic Gear is Not Used:
Calculate the revolutions.
1 revolution is 6 mm. Therefore, 10/6 revolutions.
When the Electronic Gear is Used:
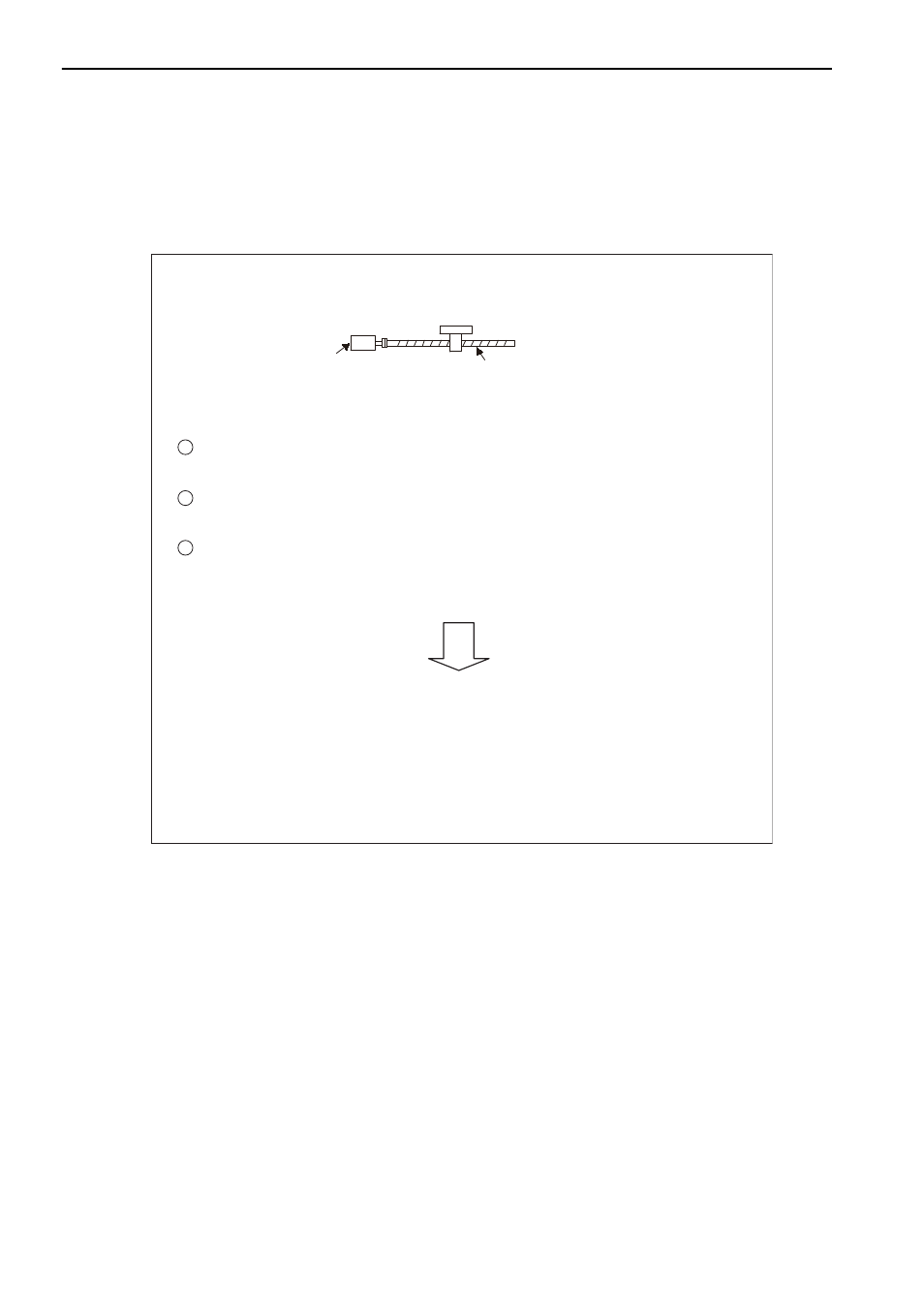
Ball screw pitch: 6 mm
Workpiece
Encoder resolution (17 bit) 131072
1
2
3
The section indicates the difference between using and not using an electronic gear when a
workpiece is moved 10 mm in the following configuration.
Calculate the required reference pulses.
131072 pulses is 1 revolution. Therefore, 10/6
×
131072 = 218453.33 pulses.
Input 218453 pulses as reference pulses.
Reference pulses must be calculated per reference.
→
complicated
The reference unit is 1
μ
m. Therefore, to move the workpiece 10 mm (10000
μ
m),
1 pulse = 1
μ
m, so 10000 1 = 10000 pulses.
Input 10000 pulses as reference pulses.
÷
Calculation of reference pulses per reference is not required.
→
simplified