Typical applications, Figure 39: humrc, Series transceiver basic application circuit – Linx Technologies HUM-xxx-RC User Manual
Page 23: Figure 40: humrc
– –
– –
40
41
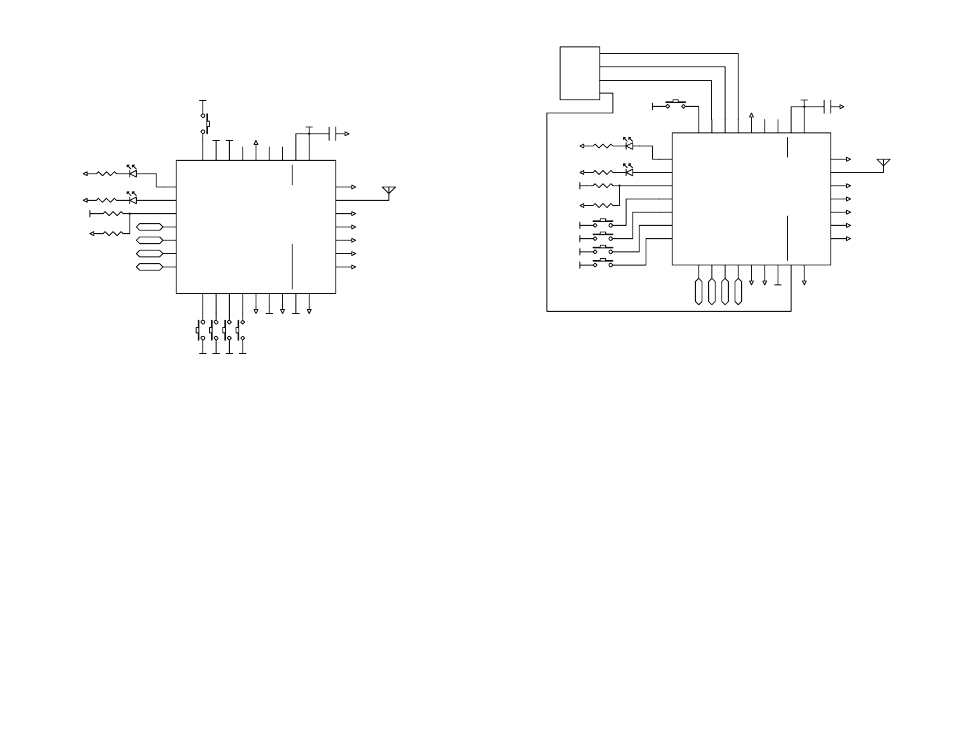
In this example, C0 is low and C1 is high, so S0–S3 are outputs and
S4–S7 are inputs. This is inverted from the circuit in Figure 39 making it the
matching device.
In this circuit, the Command Data Interface is connected to a
microcontroller for using some of the advanced features.
The microcontroller controls the state of the ACK_EN line. It can receive
a command, perform an action and then take the line high to send
Acknowledgement packets. This lets the user on the other end know that
the action took place and not just that the command was received.
Typical Applications
Figure 39 and Figure 40 show circuits using the HumRC
TM
Series
transceiver.
In this example, C0 is high and C1 is low, so S0–S3 are inputs and S4–S7
are outputs. The inputs are connected to buttons that pull the lines high
and weak pull-down resistors to keep the lines from floating when the
buttons are not pressed. The outputs would be connected to external
application circuitry.
LATCH_EN is low, so the outputs are momentary.
The Command Data Interface is not used in this design, so CMD_DATA_IN
is tied high and CMD_DATA_OUT is not connected.
ACK_OUT and MODE_IND are connected to LEDs to provide visual
indication to the user.
PAIR is connected to a button and pull-down resistor to initiate the Pair
Process when the button is pressed.
ACK_EN is tied high so the module sends acknowledgements as soon as it
receives a control message.
GND
VCC
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
VCC
S4
S5
S6
S7
VCC
GND
VCC VCC
GND
VCC
GND
VCC
GND
17
VCC
21
GND
18
RESET
22
LNA_EN
23
PA_E
N
24
CMD_DATA_OUT
26
CMD_DATA_IN
27
ACK_EN
28
PAIR
29
S6
2
GND
25
S7
1
MODE_IND
30
ACK_OUT
31
LVL_ADJ
32
S5
3
S4
4
ANT
19
GND
20
S3
5
S2
6
S1
7
S0
8
C0
10
C1
11
POWER_DOW
N
12
LATCH_EN
13
GND
9
GND
16
GND
15
GND
14
VCC
VCC
VCC
VCC
µ
RXD
TXD
GND
VCC
GND
GND
GND
GND
GND
GND
GND
GND
GND VCC
S0
S1
S2
S3
GND
VCC
GPIO
GND
17
VCC
21
GND
18
RESET
22
LNA_EN
23
PA_E
N
24
CMD_DATA_OUT
26
CMD_DATA_IN
27
ACK_EN
28
PAIR
29
S6
2
GND
25
S7
1
MODE_IND
30
ACK_OUT
31
LVL_ADJ
32
S5
3
S4
4
ANT
19
GND
20
S3
5
S2
6
S1
7
S0
8
C0
10
C1
11
POWER_DOW
N
12
LATCH_EN
13
GND
9
GND
16
GND
15
GND
14
GND
GND
GND
VCC
VCC
VCC
VCC
VCC
GPIO
GPIO
Figure 39: HumRC
TM
Series Transceiver Basic Application Circuit
GND
VCC
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
VCC
S4
S5
S6
S7
GND
VCC VCC
GND
VCC
GND
VCC
GND
17
VCC
21
GND
18
RESET
22
LNA_EN
23
PA_E
N
24
CMD_DATA_OUT
26
CMD_DATA_IN
27
ACK_EN
28
PAIR
29
S6
2
GND
25
S7
1
MODE_IND
30
ACK_OUT
31
LVL_ADJ
32
S5
3
S4
4
ANT
19
GND
20
S3
5
S2
6
S1
7
S0
8
C0
10
C1
11
POWER_DOW
N
12
LATCH_EN
13
GND
9
GND
16
GND
15
GND
14
VCC
VCC
VCC
VCC
µ
RXD
TXD
GND
VCC
GND
GND
GND
GND
GND
GND
GND
GND
GND VCC
S0
S1
S2
S3
GND
VCC
GPIO
GND
17
VCC
21
GND
18
RESET
22
LNA_EN
23
PA_E
N
24
CMD_DATA_OUT
26
CMD_DATA_IN
27
ACK_EN
28
PAIR
29
S6
2
GND
25
S7
1
MODE_IND
30
ACK_OUT
31
LVL_ADJ
32
S5
3
S4
4
ANT
19
GND
20
S3
5
S2
6
S1
7
S0
8
C0
10
C1
11
POWER_DOW
N
12
LATCH_EN
13
GND
9
GND
16
GND
15
GND
14
GND
GND
GND
VCC
VCC
VCC
VCC
VCC
GPIO
GPIO
Figure 40: HumRC
TM
Series Transceiver Typical Application Circuit with External Microprocessor