Figure 51 – Adept DeskTop 4.3 User Manual
Page 80
Adept DeskTop 4.3 - Online Help
80
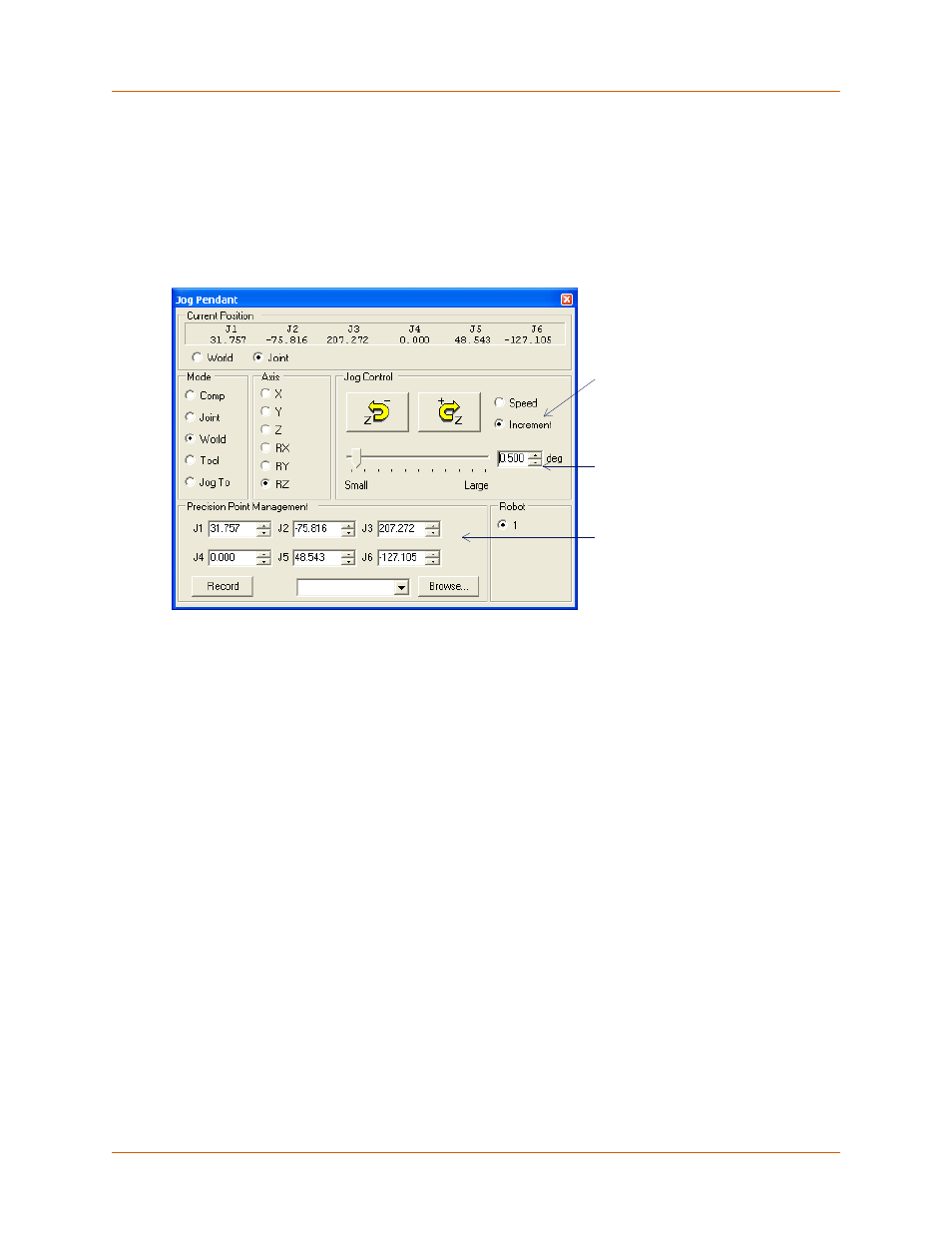
Increments are expressed in World coordinates; the Increment option sets the Jog Pendant to World
mode.
• In this mode the robot moves by the define Increment distance, in the selected direction,
regardless of the time the movement button (arrow) is maintained, except if released before
completed.
• Each time the movement button is pressed, the robot moves again, to the Increment
distance.
Figure 51 Jog Pendant set to move the robot in Increment Mode
Mode
Jog Mode sets the Mode that will be used to move the robot. These modes are described below.
Comp Mode
Comp mode is also called Computer mode. In this mode, the Jog Control commands and settings are
disabled. When Comp mode is enabled, the robot can be controlled by an executing program or the
system terminal, the operator cannot move the robot.
Joint Mode
Joint mode enables the Jog Control to move the robot about the axis of the joint selected in the Axis
group.
Incremental
movement can be
used only in 'World'
mode
Increments can be
millimeters or degrees,
depending on axis
Precision Point values
described robot position
in Joint-based values