Flowserve Modutronic 20 II Modulating Position Controlle User Manual
Page 22
Limitorque Actuation Systems Modutronic 20 II FCD LMENIM4002-00 – 08/06
22
1. If the actuator hunts upon reaching the new set-point, reduce the GAIN control by
turning in the CCW
u
direction until the hunting stops and proceed to Step e.
2. If the unit continues to hunt after the GAIN control adjustment, proceed to Step d.
d. Rotate the GAIN control fully CCW
u
and then 15 turns CW
z
; adjust the DEADBAND
to a less accurate setting and repeat the GAIN setting procedure starting with Step a. For
example, if DIP Switch 3 is ON and DIP Switches 1, 2, and 4 are OFF the DEADBAND setting
is at 1% accuracy; change the DIP Switch setting to 11/2% accuracy and repeat the proce-
dures 13a through 13e until the correct DIP Switch and GAIN control eliminates actuator
hunting. See Table 6.1 for DIP Switch setting levels of deadband accuracy.
e. Rotate the GAIN control an extra 1/2 turn CCW
u
to eliminate the possibility of future actuator
hunting.
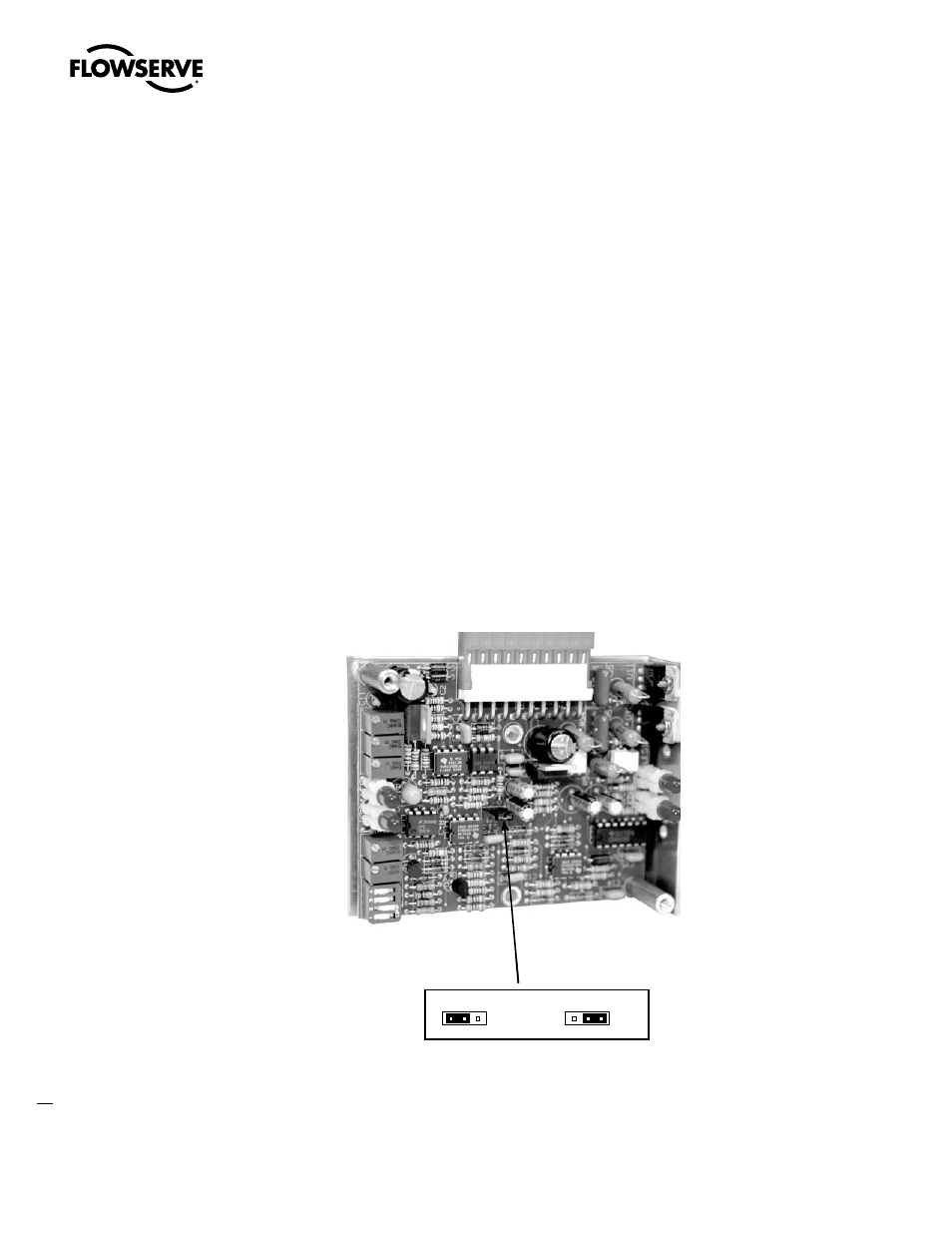
16. Set desired FAIL TO mode. See Figure 6.4.
a. If LOCK-IN-LAST-POSITION is desired when loss of input signal occurs, install a jumper at
JP1 to connect Pin 1 and 2.
b. If FAIL-TO-4mA-POSITION is desired when loss of input signal occurs, install a jumper at
JP1 to connect Pin 2 and 3.
NOTE: Be sure to use one of the two jumper selections discussed above; FAIL-TO operation
will be forfeited if JP1 is not used.
Figure 6.4 – FAIL TO Mode JP1 Jumper
17. Your Mod 20 II should now be properly calibrated.
Lock-In-Last
Fail-to-4 mA-Position
JP1
1 2 3
JP1
1 2 3
Lock-In-Last
Fail-to-4 mA-Position
JP1
1 2 3
JP1
1 2 3