6 quadrant correction (0x2040), 7 heating (0x2041h) – ifm electronic JN2300 User Manual
Page 20
Inclination sensor JN
20
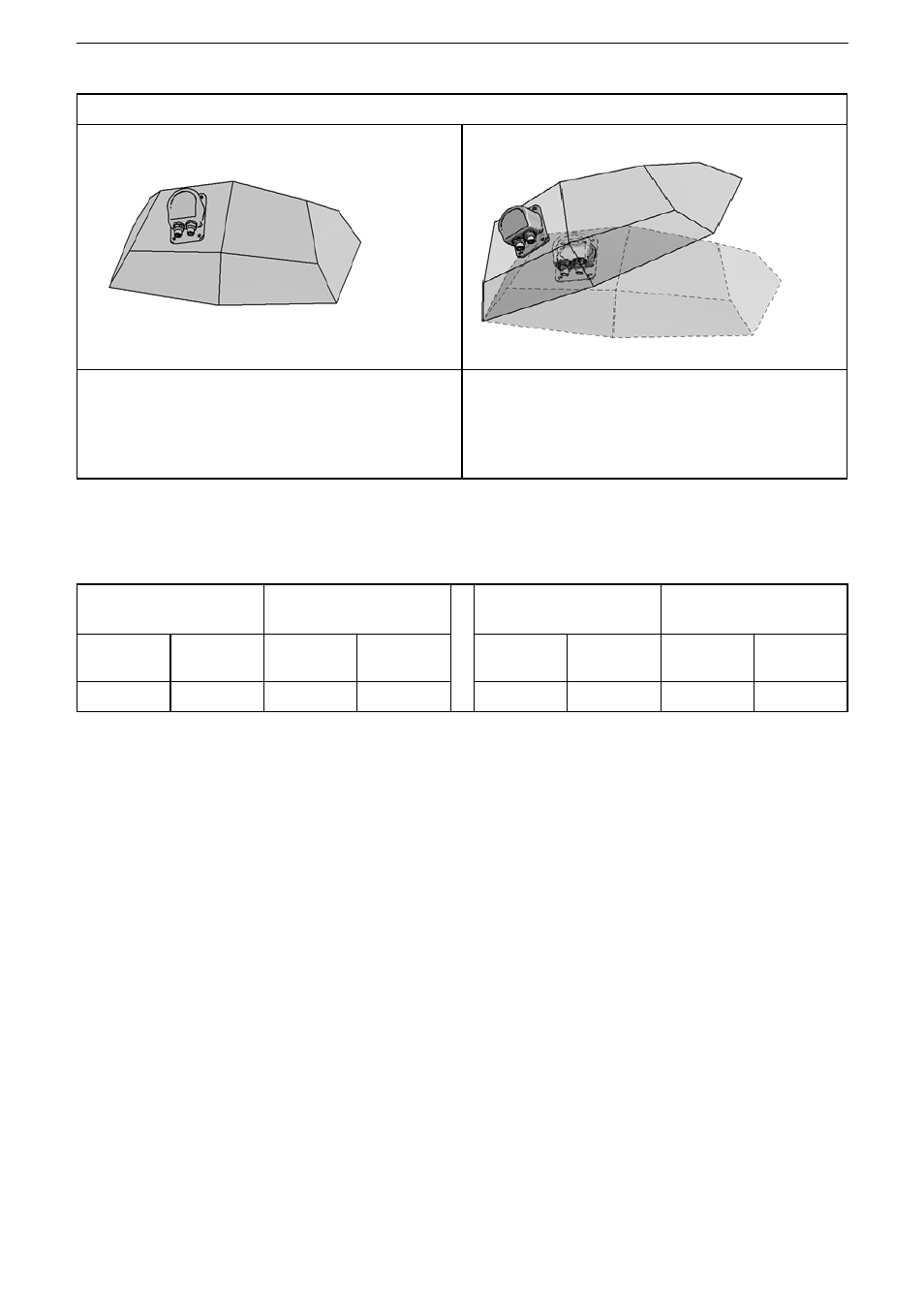
Explanatory example
Inclination sensor installed at an angle in the
coordinate system of the workpiece� The coordinate
system of the sensor is transferred to the coordinate
system of the workpiece by teaching the sensor
when the workpiece is horizontally aligned�
The raw data of the sensor is indicated in the
coordinate system of the sensor�
In teach mode the data is converted into the
coordinate system of the workpiece�
The example shows a rotation of 30° about the Y axis of the coordinate system of
the workpiece�
Perpendicular angle
without teach
Teach mode
Perpendicular angle
without teach
Teach mode
Longitudinal
angle value
Lateral
angle value
Longitudinal
angle value
Lateral angle
value
Longitudinal
angle value
Lateral angle
value
Longitudinal
angle value
Lateral angle
value
-13�2°
-29�3°
0°
0°
-45�5°
-29�5°
-30°
0°
10.6 Quadrant correction (0x2040)
Quadrant correction means for JN2300 only an extension of the lateral Euler
angle to the measuring ranges ± 180° (corresponds to 2040h = 1) or 0���360°
(corresponds to 2040h = 2)�
10.7 Heating (0x2041h)
To ensure good temperature stability over the whole temperature range, the
measuring cell is regulated to a constant temperature using a PID controller� The
regulation of the heating is set by the factory and can be deactivated by writing the
value 0 to the parameter of the heating (index 2041h)�
This has the following effects:
> Reduction of temperature stability
> Current consumption decreases when operating
> Accuracies deviate from the indications in the data sheet