Gullco GK-200-RLx-I User Manual
Page 14
12
Notes:
The indexing device (motorized rack arm) can be manually driven during an automatic cycle by
using the Forward/Neutral/Reverse switch of the Index Control (Slave). However, manual operation
will be disallowed and the Forward/Neutral/Reverse switch position ignored, during an actual index.
The “Index Command” signal is a high signal generated from CN84 of the Cycle Control (Master)
and is registered between pins 1 & 2 of CN12 of the Index Control (Slave).
The “Ready” signal is a high signal generated from CN83 of the Index Control (Slave) and is
registered between pins 1 & 2 of CN12 of the Cycle Control (Master).
The “Index Complete” signal is a high signal generated from CN84 of the Index Control (Slave) and
is registered between pins 1 & 3 of CN12 of the Cycle Control (Master).
A terminated cycle will reset the “Index Command” and the “Index Complete” signals.
If the Cycle Control (Master) detects an encoder problem, (either the encoder is not connected, or
does not provide feedback for one second after the motor output has been energized), the control
will display “Er.5” and will not function until the problem is rectified. If the control is powered-up with
a faulty or missing encoder, it will flash “Er.5” for 5 seconds, switch itself to “open loop mode” and
allow full operation in both manual and automatic modes (in open loop mode, there is no travel
speed regulation and travel speed is displayed as a percentage rather than actual speed).
If the Index Control (Slave) detects an encoder problem, (either the encoder is not connected, or
does not provide feedback for one second after the motor output has been energized), the control
will display “Er.5” and will not function until the problem is rectified. If the control is powered-up with
a faulty or missing encoder, it will flash “Er.5” for 5 seconds, switch itself to “open loop mode” and
allow manual operation (in open loop mode, there is no travel speed regulation and travel speed is
displayed as a percentage rather than actual speed), however, if an automatic cycle is initiated,
when the time comes to perform an index, the control will display “Er.5” , the auto cycle will abort
and Index Control (Slave) will not function until the problem is rectified.
When limit switches stop or inhibit commanded travel motion, the relevant directional LED will flash
on and off until the commanded motion is reset.
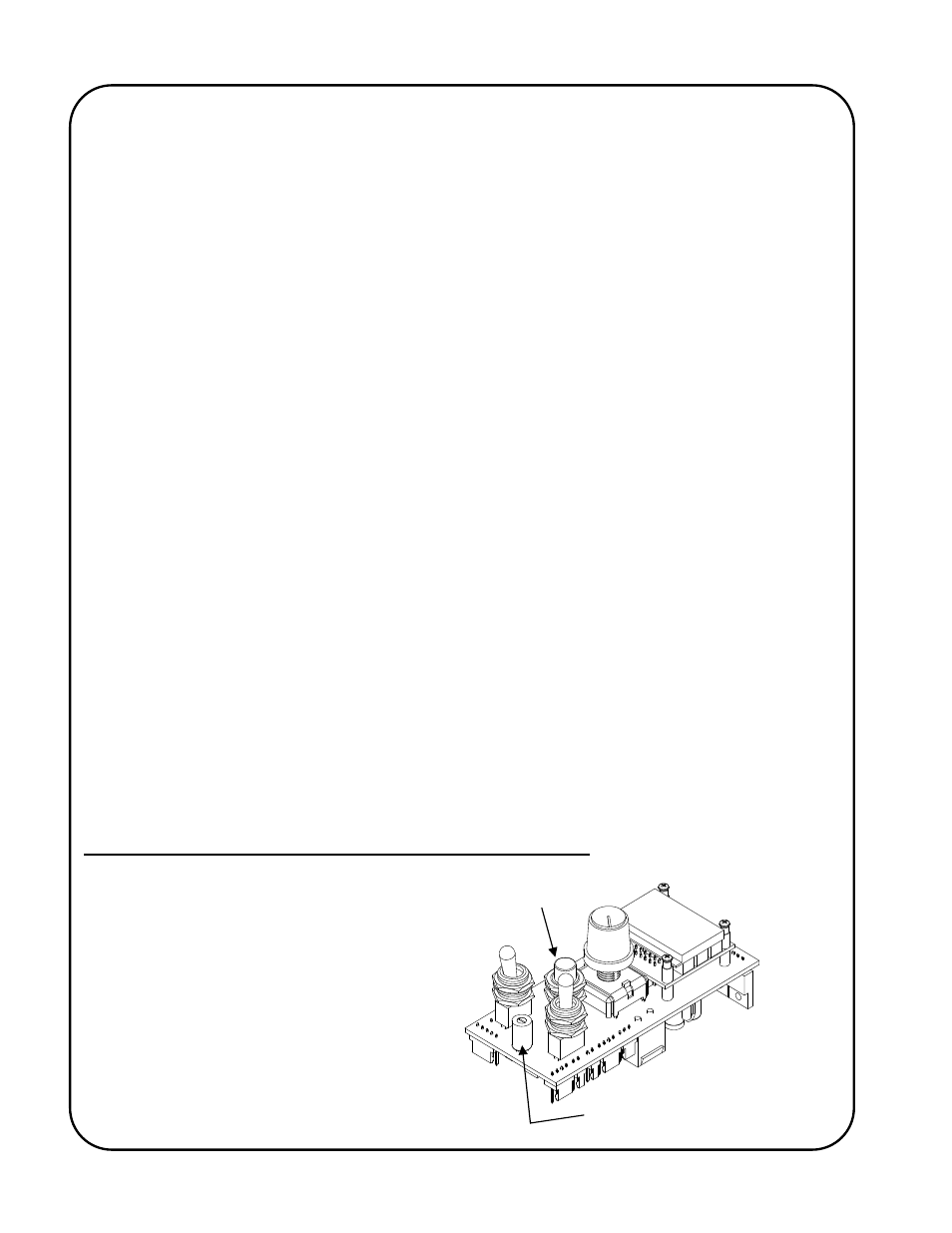
Programming The Automatic Cycle Parameters/Variables
The Program Variable Selector Switch is
used to select the different programmable
parameters that allow the operator to
change their values and settings and so
define how the automatic cycle will
function. The Program Variable Selector
Switch is located between and below the
Run/Stop switch and the
Forward/Neutral/Reverse switch of the
GSP control. The GSP controls that are
typically supplied with the “KAT”
®
carriage
indexing systems have Program Variable
Selector Switches, which extend through
Cycle Push Button
Program Variable Selector Switch
Extended or Recessed (shown)