Yaskawa MP2000iec User Manual
Page 11
Subject: Example Code Manual
Product: MP2000iec
Doc#: EM.MCD.09.095
Title: Example Code Manual for Linear Flying Shear on MP2300Siec Sigma-5 Demo using camming
July 13, 2009
Page 11 of 21
Program Explanation:
The various POUs in the sample project are explained in this section.
Initialize: This POU runs for the first scan and initializes the axis IDs and other relevant application parameters
like sensor to start distance, shift start distance and cycle.
Enable: The Enable POU controls the enabling of the two axes. There is a reset alarms control in this PO.
Monitor: The Monitor POU has function blocks that monitor parameters like master position, slave position,
master shifted position and unmodularized (raw) master position
Home: The Home POU controls how the user defines the home position for the slave. Home position for the
master is not significant because the master is a rotary infinite axis. After a home position is set once in a run,
the slave axis can be commanded to go to that home position at any instant using a MC_MoveAbsolute block.
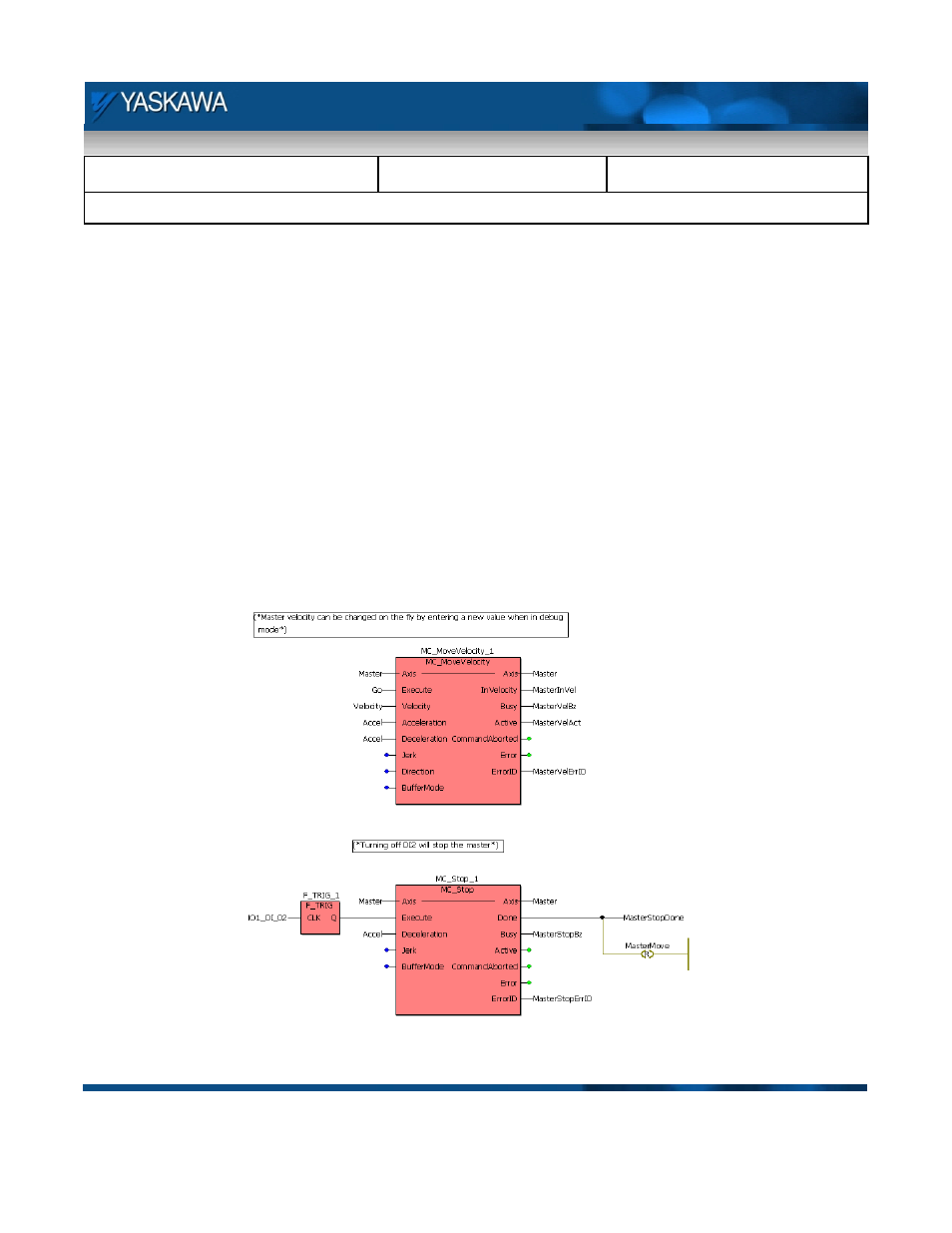
Production:
Figure 9: Master move control