Yaskawa F7 Drive Enhanced PID With Digital Velocity Follower User Manual
Page 12
Date: 08/08/05, Rev: 05-08
Page 12 of 17
TM.F7SW.058
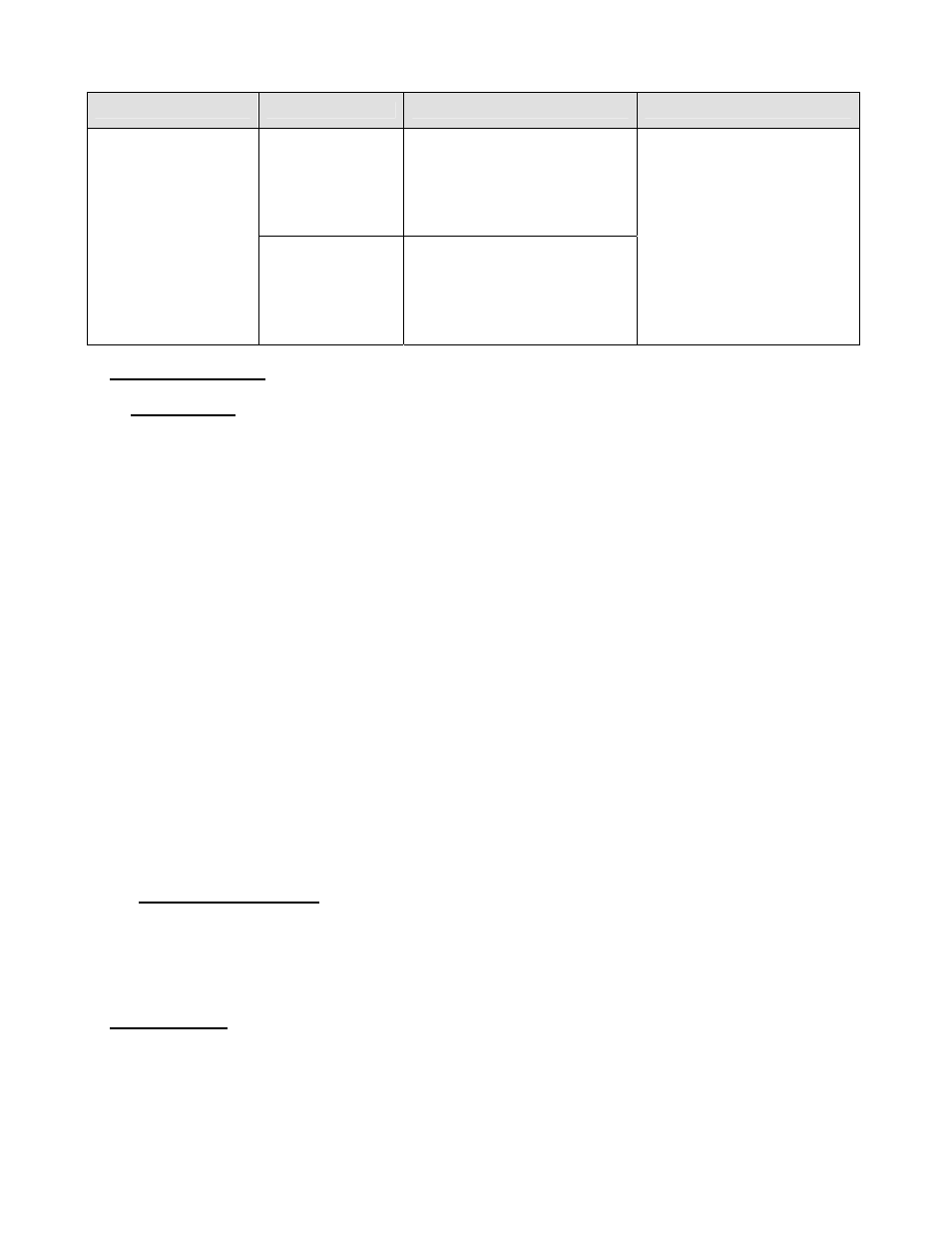
4.7 Pulse Output Monitor Configuration
Option Card
P3-06 Setting
Input Terminals: Signal Name
Output Terminals: Signal Name
0: Channel 1
3: A +
4: A -
5: B +
6: B -
7: Z +
8: Z -
PG-W2
1: Channel 2
10: A +
11: A -
12: B +
13: B -
14: Z +
15: Z -
17: A +
18: A -
19: B +
20: B -
21: Z +
22: Z
-
5.0 Function Description
5.1 Enhanced PID
The Enhanced PID feature includes many enhancements over the drive’s standard PID function. The PID
algorithm is programmed using the existing b5 group of parameters as well as the P group of parameters.
Enhanced features include:
• The value of the PID feedback is monitored, and can trigger digital outputs, alarms, and faults based
upon preset high and low levels.
• The ramp in the PID setpoint behaves differently depending upon the PID mode and the reference
source. In most cases, the PID setpoint ramp affects only the PID setpoint. When the PID + Trim
feature is enabled (B5-01 = 3 or 4) and there is no independent PID setpoint, the PID ramp affects both
the PID setpoint and the frequency reference.
• The PID output is now algebraically summed with the frequency reference. Motor rotation will be
forward if: a forward run is commanded and there is a positive PID + trim, or if a reverse run is
commanded and there is a negative PID + trim. Motor rotation will be reverse if: a reverse run is
commanded and there is a positive PID + trim, or if a forward run is commanded and there is a
negative PID + trim.
• Some further functionality has been added to the PID algorithm:
a. Increased resolution of the PID Output Gain
b. Independent positive and negative integral holds
c. Independent positive and negative PID output limits
d. Added setpoint offset parameter
e. The PID output can be added directly to, or multiplied by, the frequency reference.
f. The output of the PID can be proportional to the frequency reference.
5.2 Digital Velocity Follower
When the Digital Velocity Follower is enabled (B1-01 = 5), the drive will follow the speed of the encoder
signal (Channel 1 of the PG-X2 or PG-B2, channel 2 of the PG-W2). Using the gear ratio parameters P3-
02 and P3-03, the drive can be made to run at a ratio of the master speed. Further adjustment of the ratio
can be obtained using parameter P3-04. Parameter P1-05 determines how the drive reacts when the
encoder reference changes directions. This reference can be used alone or in the enhanced PID function.
6.0 Block Diagrams
The following pages give detailed flowcharts of the following software functions:
6.1 Enhanced PID with 2 Inputs (B5-01 = 1 or 2)
6.2 Enhanced PID with 2 Inputs (B5-01 = 3 or 4)
6.3 Enhanced PID with 3 Inputs (B5-01 = 3 or 4)
6.4 Enhanced PID Feedback Detection
6.5 Digital Velocity Follower