Yaskawa A1000 User Manual
Page 17
2 Electronic Line Shaft
YASKAWA TM.A1000SW.064 Electronic Line Shaft with Alignment A1000 Custom Software Supplement
17
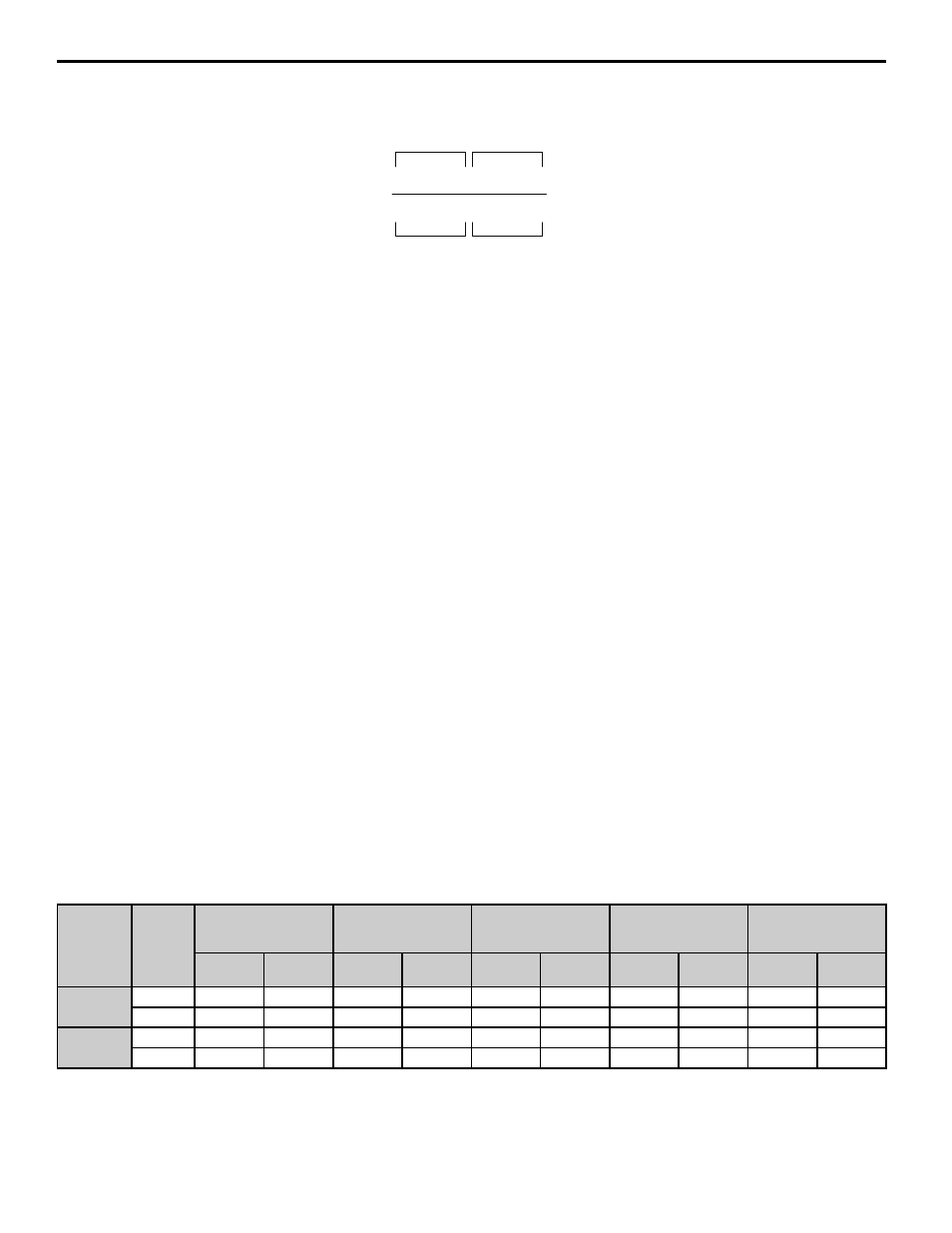
The formula for the primary gear ratio is:
Figure 4
Figure 4 Primary Gear Ratio Formula
The pairs of numerator and denominator parameters are used together to form an 8-digit number divided by an 8-digit
number. Use P1-03/P1-04 for ratios that can be expressed using 4-digit numbers or fewer. Gear ratio 2 can only be
expressed as a 4-digit number divided by a 4-digit number.
The gear ratio required for the application must be able to be exactly expressed (including the complete remainder) by the
formula in
. If the ratio cannot be exactly expressed, the follower will drift in phase over time. The Simple
Automatic Alignment function can be used to correct for drift over time if alignment sensors such as proximity sensors
from both the master and follower systems are available as digital inputs to the follower drive.
If necessary, the ratio can be further adjusted using the Digital Ratio Adjustment, the Analog Ratio Adjustment (H3-02/
06/10 = 20), the MOP Adjust multi-function inputs (H1-0
= 84 to 86), and the Communication Ratio Adjustment
(register 00DH). These adjustments are summed and then added to 100% to produce the total gear ratio adjustment, which
is multiplied by the incoming master speed reference (after gear ratio calculation).
When parameter P1-01, Follower Mode Selection, is set to 4 or 5 (ELS modes), the drive will track follower position
relative to the master encoder. A PI regulator is applied to the position error. The PI regulator output trims the speed
reference calculated from the master encoder signal, gear ratio parameters, and gear ratio adjustment to synchronize the
position of the follower motor with the position of the master. The Advance Follower (H1-0
= 82) and Retard Follower
(H1-0
= 83) multi-function inputs can also be used to change the position of the follower relative to the master.
When the gear ratio of the drive is changed during run by changing the gear ratio parameters during run or because of a
change of state of the Ratio 2 Select multi-function input, the drive will ramp to the new ratio using Accel/Decel Time 2
(C1-03/C1-04). If an ELS mode is selected, the position error will be held to zero during the ratio change until the drive
re-enters Speed Agree (based on setting of P3-07, Ratio Change Speed Agree Width).
When parameter P1-01, Follower Mode Selection, is set to 4 (standard ELS mode), the follower motor direction is always
the same as the master encoder direction. Forward and reverse Run commands are treated identically. When P1-01 is set
to 5 (Sign Run mode), the drive behaves identically to when P1-01 is set to 4, except that when a reverse Run command is
given it will cause the follower drive to match speed and position in the opposite direction of the master.
shows
the direction of the Follower depending on the direction of the Master, P1-01 setting, b1-04 (Reverse Operation Prohibit
Selection) setting, and the Forward Run/Reverse Run digital input signal.
Table 13 Follower Rotation Direction for Various Settings and Master Direction
b1-04
(Reverse
Operation)
Digital
Input
Signal
P1-01 = 1
Speed Follower -
Both Directions
P1-01 = 2
Speed Follower -
Forward Direction
P1-01 = 3
Speed Follower -
Absolute Value
P1-01 = 4
Electronic Line
Shaft
P1-01 = 5
Electronic Line
Shaft -Sign Run
Master:
FWD
Master:
REV
Master:
FWD
Master:
REV
Master:
FWD
Master:
REV
Master:
FWD
Master:
REV
Master:
FWD
Master:
REV
b1-04 = 0
Enabled
FWD
FWD
REV
FWD
NONE
FWD
FWD
FWD
REV
FWD
REV
REV
REV
FWD
NONE
REV
REV
REV
FWD
REV
REV
FWD
b1-04 = 1
Enabled
FWD
FWD
NONE
FWD
NONE
FWD
FWD
FWD
NONE
FWD
NONE
REV
NONE
NONE
NONE
NONE
NONE
NONE
NONE
NONE
NONE
NONE
Master
Encoder
Frequency
Reference
(U7-02)
X
X X X X X X X X
X X X X X X X X
=
Follower
Frequency
Reference
(U7-03)
P1-03
P1-04
P1-05
P1-06