Yaskawa S12051 for GPD 515/G5 User Manual
Page 4
Flash Software-PID for Trim Control
Option S12051 for GPD 515/G5
Yaskawa Electric America, Inc-www.drives.com
02Y00025-0428 Page 4 of 11
Date: 08/23/01
b5-05: Differential Time
Differential time can be adjusted to increase system response to fast load or reference changes, and to reduce overshoot
upon startup. To eliminate the differential function entirely, set this parameter to 0.00 seconds.
b5-06: PID Output Limit
This parameter can be used to set the maximum effect the PID controller will have on the system. This works whether
the PID controller output is positive or negative. NOTE: When the PID output limit is reached, the integrator will hold and
not increase in value until the PID output is less than the PID output limit.
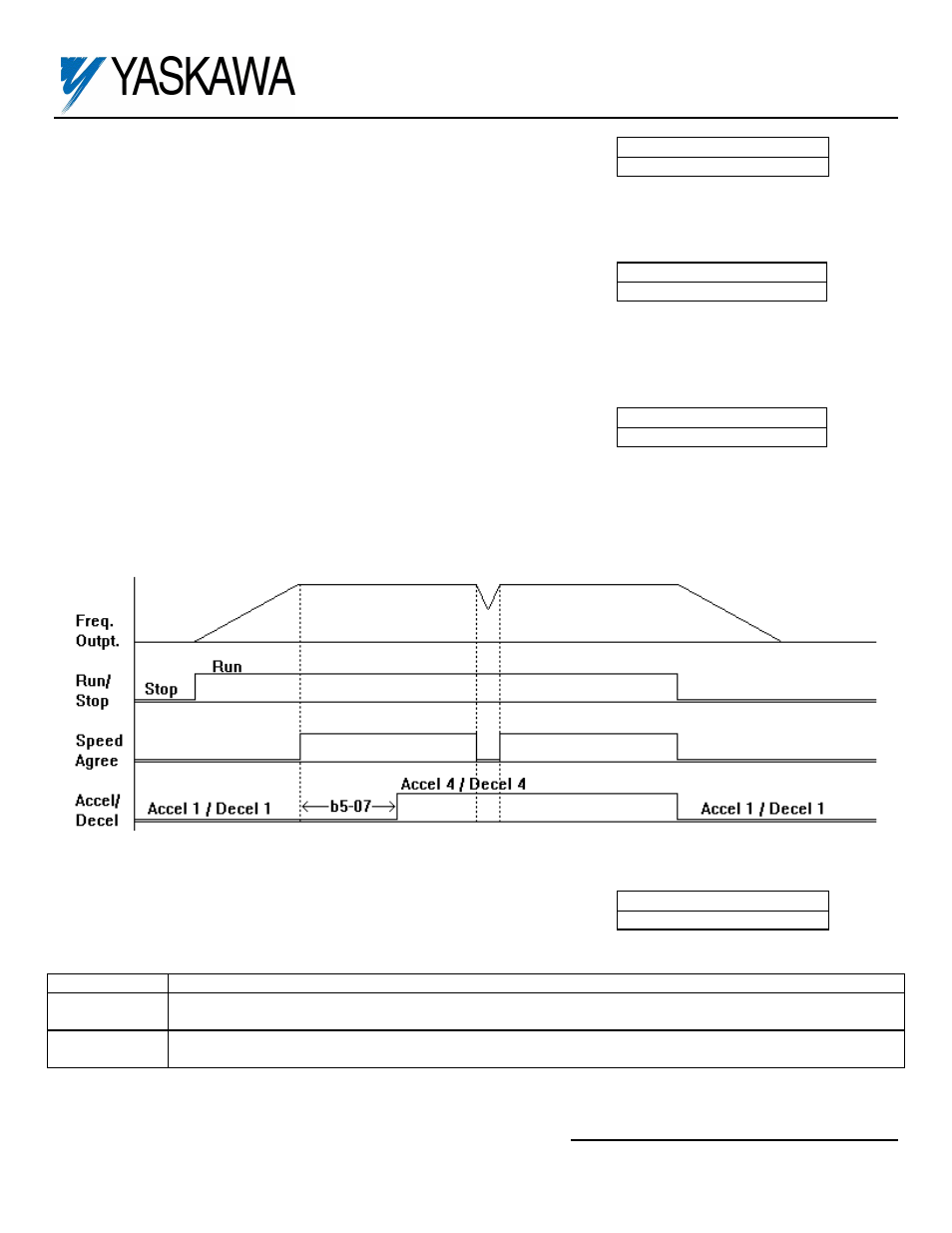
b5-08: Accel/Decel Switching Delay
This parameter sets the amount of time after achieving set speed when the accel/decel ramps will switch between their
present settings and Accel/Decel 4 (C1-07 & C1-08). When a stop command is given, the Accel/Decel ramps will revert
to Accel 1 / Decel 1. This feature is only effective when b5-01 = 3.
Timing Chart of Output + Reference, With accel / decel timer (b5-01 =3)
b5-09: PID Output Select
This parameter determines whether the output of the PID controller will be added to or subtracted from the frequency
reference (only when b5-01 = 2 or 3).
Setting Description
0
Not Inverted
The output of the PID controller will be added to the frequency reference. This would be used when the
output voltage or current of the feedback device increases with motor speed.
1
Inverted
The output of the PID controller will be subtracted from the frequency reference. This would used when
the output voltage or current of the feedback device decreases with motor speed.
Factory Setting: 0.00
Range: 0.00-10.00 seconds
Factory Setting: 100.00
Range: 0.00 - 100.00
Factory Setting: 0.00
Range: 0.00-10.00 seconds
Factory Setting: 0
Range: 0, 1