Nexen RSTC1100 964528 User Manual
Page 17
17
FORM NO. L-21204-C-0705
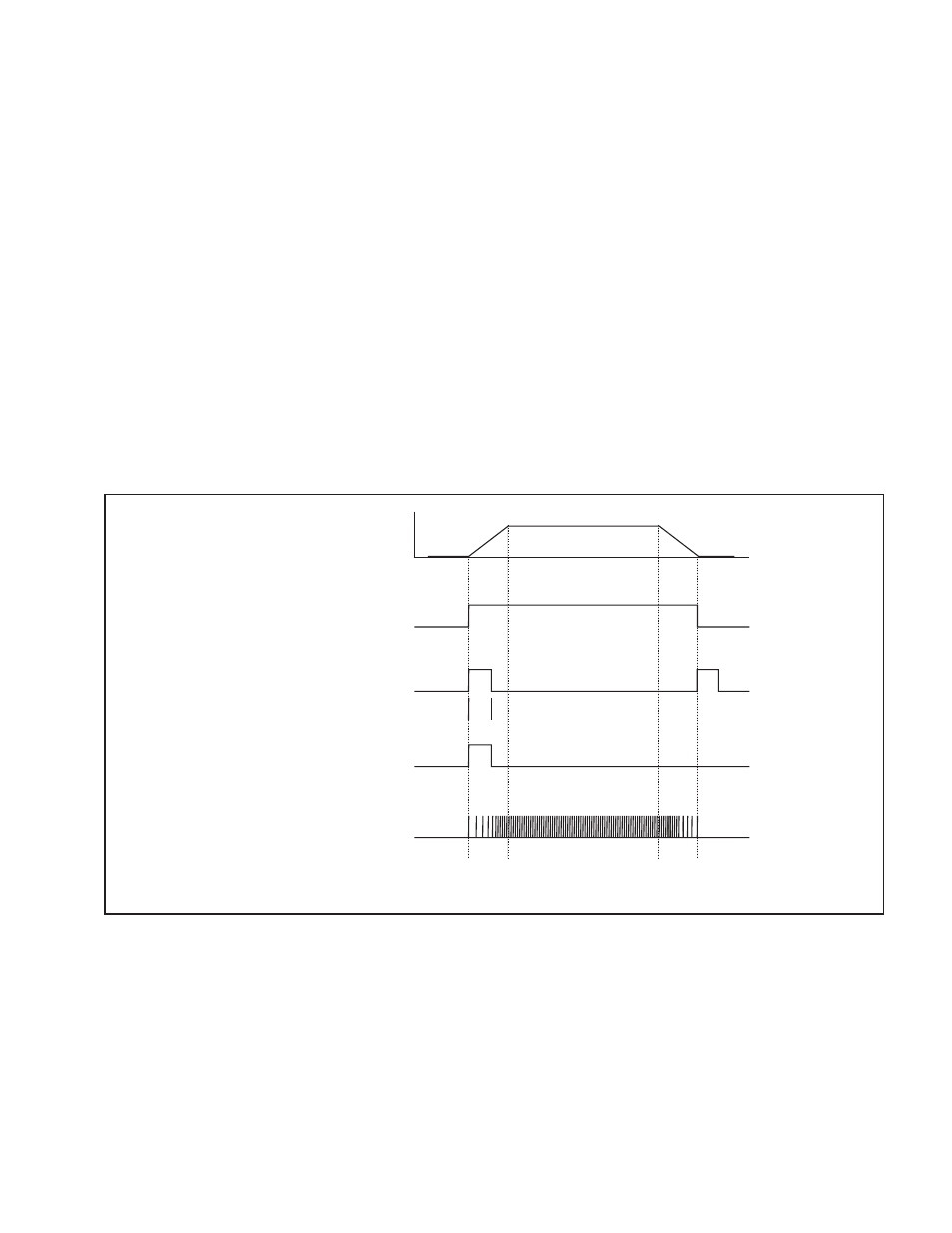
Run Pulsed
(Encoder)
Run Only
(Momentary)
Run / Stop
(Momentary)
Run / Stop
(Maintained)
0%
100%
Machine Speed
Pulse Time (t) must be > 100ms
-t-
Time
R
UN
O
NLY
S
IGNAL
M
OMENTARY
When the Start/Stop input signal pulses high, the RSTC
algorithm will begin adapting to account for the roll’s diam-
eter and inertia. The web must be in motion for unwinding
applications or in tension for winding applications when
this signal goes high otherwise the Adaptive Gain will
increase to maximum. After the machine stops, the RSTC
will continue trying to adapt until the Run/Stop input pulses
high again and forces the adaptation process to start over
from Initial Adaptation.
Figure 20
R
UN
/S
TOP
S
IGNAL
M
OMENTARY
When the Run/Stop input signal pulses high, the RSTC
algorithm will begin adapting to account for the roll’s
diameter and inertia. The web must be in motion for
unwinding applications or in tension for winding applica-
tions when this signal goes high otherwise the Adaptive
Gain will increase to maximum. After the Run/Stop signal
pulses high a second time, the Adaptive Gain will return
to Initial Adaptation, as the RSTC assumes the machine
has stopped (See OPERATIONS section).
R
UN
P
ULSED
(E
NCODER
)
The fi rst time a machine driven encoder pulses Run/Stop
input, the RSTC algorithm will begin adapting to account
for the roll’s diameter and inertia. The web must be in mo-
tion for unwinding applications or in tension for winding
applications when this signal goes high otherwise the
Adaptive Gain will increase to maximum. The RSTC will
continue to actively adapt until the encoder pulsing ceases
for three seconds. At that time, the RSTC assumes the
machine has stopped and the Adaptive Gain will return to
Initial Adaptation (See OPERATION section). The encoder
pulse frequency must be in the range of 1Hz to 10 kHz.
R
UN
/S
TOP
VIA
C
OMMUNICATIONS
Select this option if the Run/Stop signal will be provided
by software command over an industrial network.
After determining the appropriate signal type, make a
selection from the list of options in the Run/Stop Window
(refer to Figure 19) and press SEND.