Applied Motion ST10-C-CE User Manual
Page 29
29
920-0025 Rev K
3/5/2015
CANopen User Manual
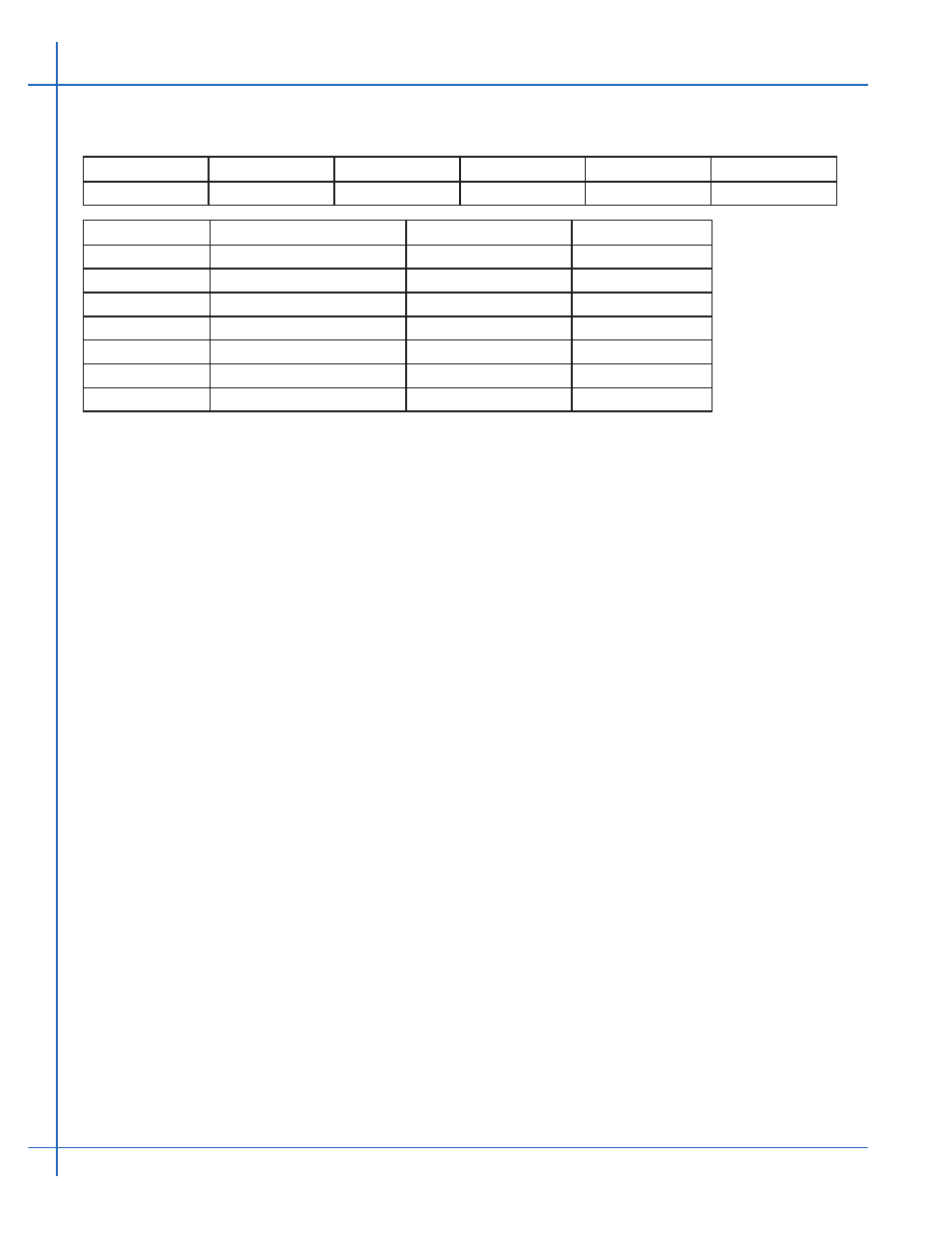
0x1029 Error behavior
This object contains the error information of the CANopen driver.
Object Type
Sub Number
Data Type
Access Type
PDO Mapping
COS
Array
7
UNSIGNED8
rw
no
no
Subindex
Name
Default value
Actual value
00
max sub-index
6
01
Communication
0x00
02
Communication other
0x00
03
Communication passive
0x01
04
Generic
0x00
05
Device profile
0x00
06
Manufacturer specific
0x00
Value definition for all subindexes:
0x00 - if operational, switch to NMT pre-operational
0x01 - do nothing
0x02 - switch to NMT stopped
01 - Communication error - bus off or Heartbeat consumer error.
02 - Communication other error (critical errors - see ‘Error status bits’) except CAN bus
passive but including bus off or Heartbeat consumer.
03 - Communication passive - any communication error including CAN bus passive.
04 - Generic error (critical errors - see ‘Error status bits’).
05 - Device profile error - bit 5 in error register is set.
06 - Manufacturer specific error - bit 7 in error register is set.
0x1200 SDO server parameter
The object holds the COB-ID (communication object ID, also known as CAN message ID)
values used to access the driver’s SDO.
1. Sub-index 0 contains the number of sub-elements of this record.
2. Sub-index 1 used by the driver to receive SDO packets. The value is 0x600 +
$NODEID.
3. Sub-index 2 gives the COB-ID used by the driver to transmit SDO packets. The value is
0x580 + $NODEID.