Figure 6-17. joint 2 adjustable hardstop locations, Figure 6-18. fixed hardstop device for joint 2, Figure 6-17 – Adept i600 Cobra User Manual
Page 87
Installing Adjustable Hardstops
Adept Cobra i600/i800 Robot User’s Guide, Rev G
87
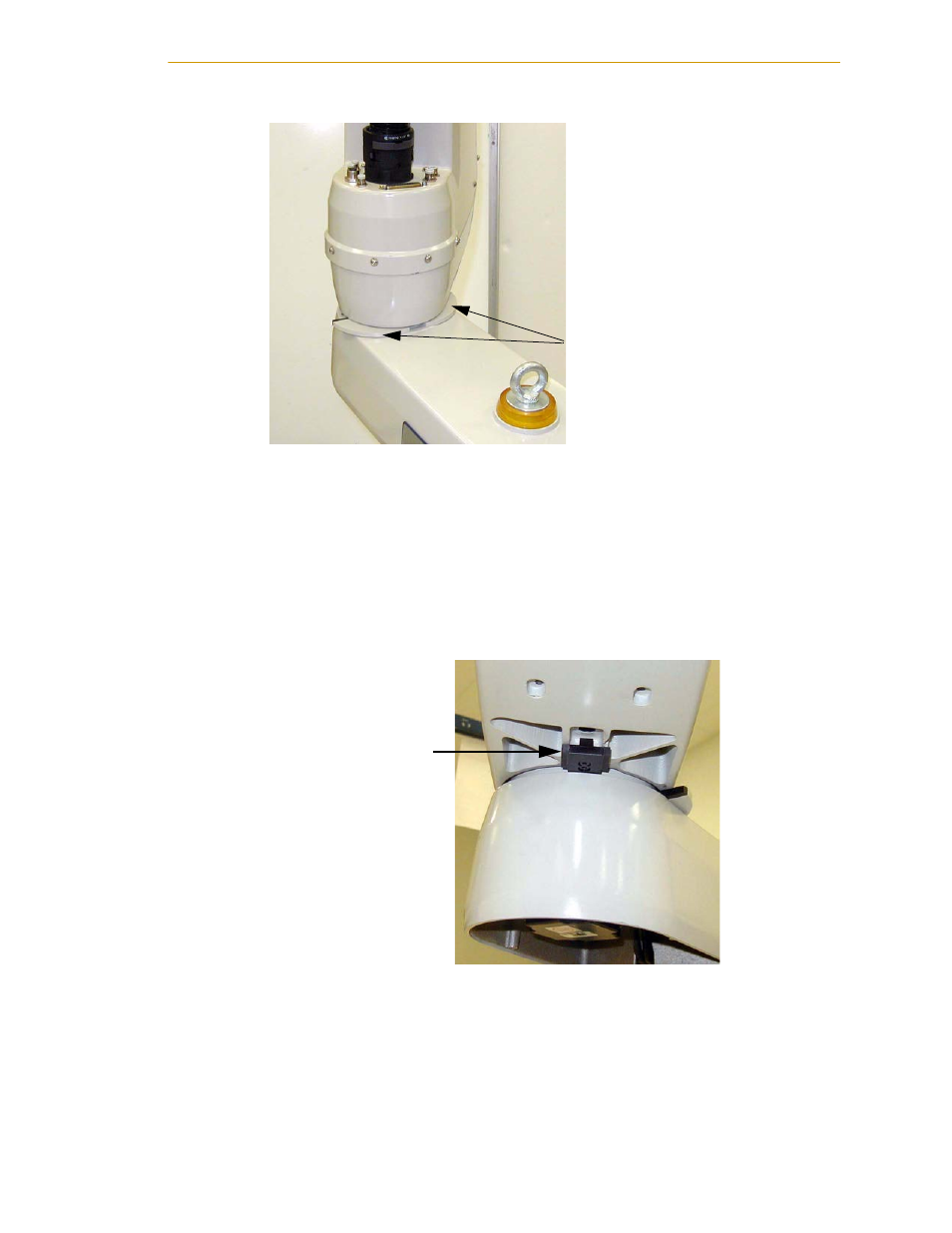
Figure 6-17. Joint 2 Adjustable Hardstop Locations
2. Use a 4 mm Allen wrench to install four supplied M5 x 10 screws to secure the
plate. Tighten the screws to a torque of 4.5 N·m (40 in·lb). Repeat the process for
the second plate. Note that the plates can be installed in different positions,
depending on how much you need to limit the range of Joint 2. See
3. Slide the fixed hardstop block into the slot on the underside of the outer link. See
Figure 6-18. Fixed Hardstop Device for Joint 2
4. Use a 3 mm Allen wrench to install two supplied M4 x 10 screws to secure the
hardstop block. Tighten the screws to a torque of 2.5 N·m (22 in·lb).
Joint 2 Adjustable
Hardstop Plates Installed
Joint 2 Fixed Hardstop
Block installed on
underside of outer link