Figure 28 real time communication, Real time communication, Figure 28 – HEIDENHAIN PROFINET User Manual
Page 48
PROFINET IO data description
48
4.12
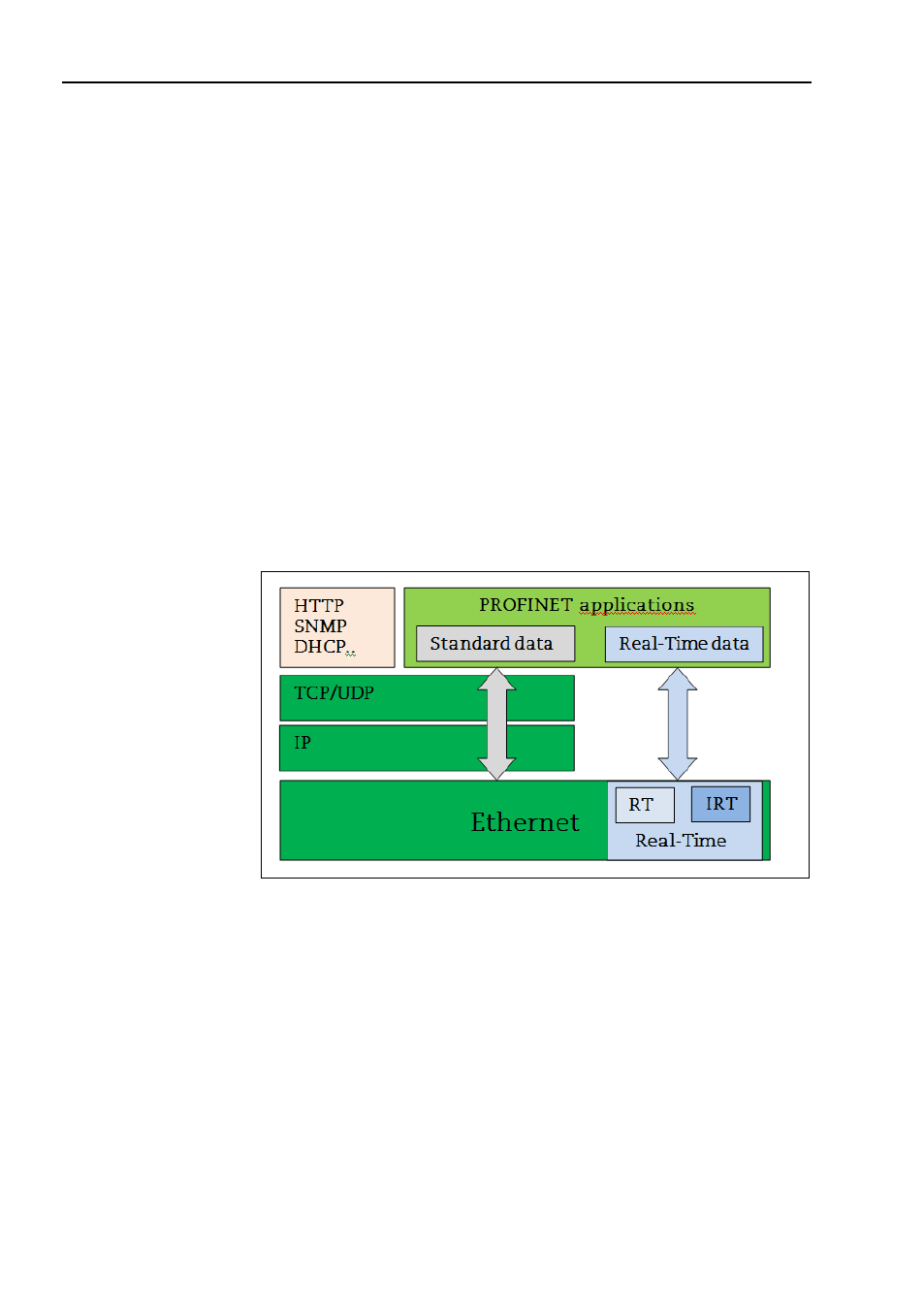
Real time communication
PROFINET IO uses three different communication channels to ex-
change data with programmable controllers and other devices.
The non real time channel based on for example TCP (UDP)/IP is
used for parameterization, configuration and acyclic read/write
The RT or Real Time channel is used for process data transfer and
Real-time data are treated with a higher priority than data sent
over the open channel. RT communications overrides the open
channel to handle the data exchange with programmable Control-
The third channel, Isochronous Real Time (IRT) is the high perfor-
mance, high speed channel used for demanding motion Control
applications. IRT data are treated with a higher priority than RT da-