Chapter 3: communications – Microcom 466 User Manual
Page 19
466 Operators Manual
13
CHAPTER 3: COMMUNICATIONS
The 466 can be interfaced to PC's, mini-computers, main frames, and special purpose
machines. It is capable of serial RS-232 or optional Centronics® parallel communication. The
following sections explain the communication interfaces.
Out of the box, unless otherwise requested, the 466 communicates using serial RS-232 at
9600 bits per second, 8 data bits, 1 stop bit and no parity with both hardware and software
handshaking. This configuration may be changed as shown in Appendix C.
3.1
CABLE PINOUT
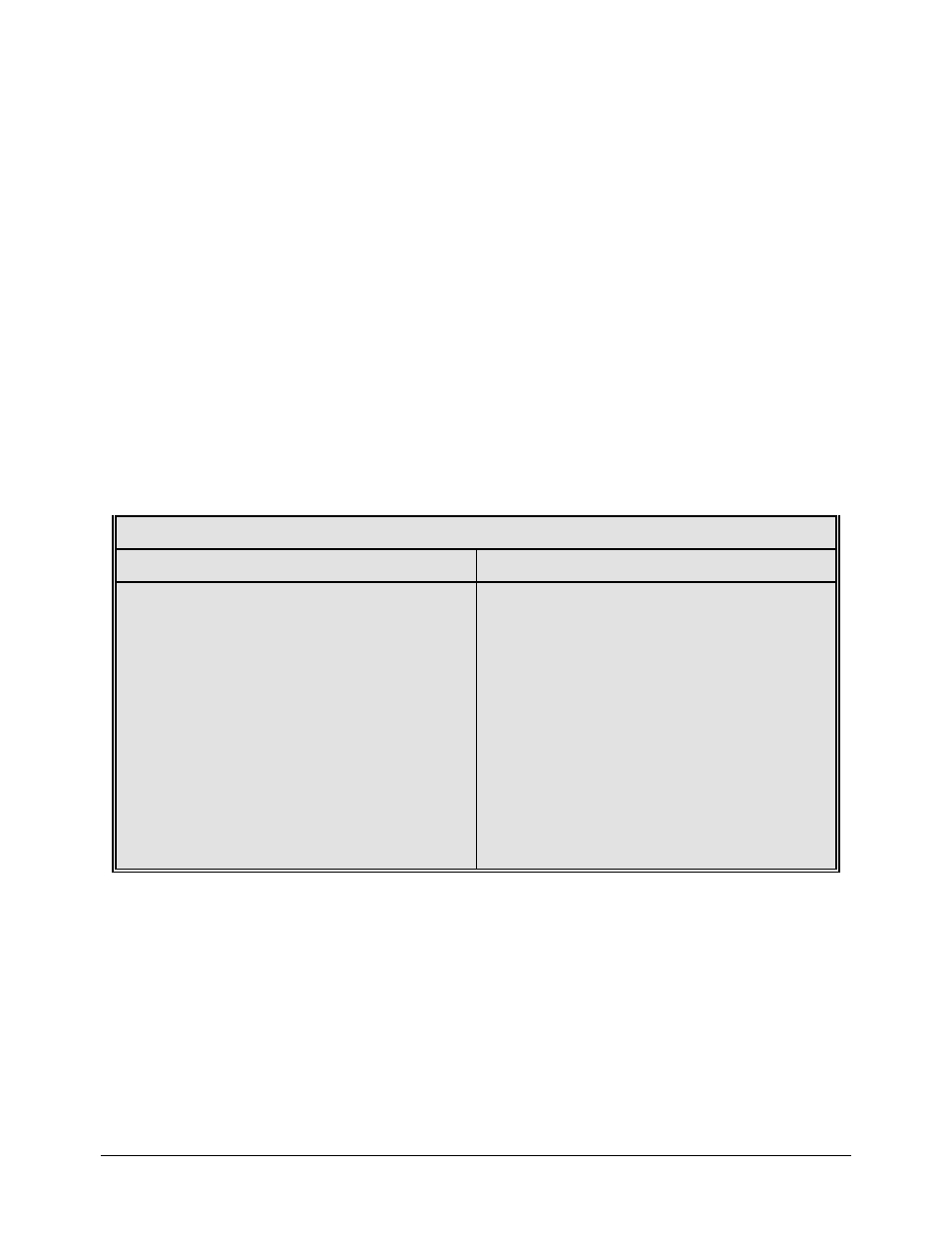
Table 2 shows the signals of the 25-pin RS-232 serial port configuration.
If serial RS-232 communication is selected and XON/XOFF hand shaking is used, the only
signals the 466 requires are the RXD, TXD, and GND signals. If hardware (CTS/RTS) hand
shaking is used, a RTS signal is provided. XON/XOFF may be disabled through software dip
switch #1 (see Section 5.3.1). The other signals are offered in the event the host computer
requires these signals.
Serial Port Configuration
25 TO 9 PIN
25 TO 25 PIN
State 466 Direction PC
HI 8 DCD ---->---- DCD 1
XX 3 TXD ---->---- RXD 2
XX 2 RXD ----<---- TXD 3
HI 6 DSR ----<---- DTR 4
LO 7 GND ---<->--- GND 5
HI 20 DTR ---->---- DSR 6
DC 4 CTS ----<---- RTS 7
XX 5 RTS ---->---- CTS 8
HI 18 +5V
DB-25 DE-9
DC = Do Not Care
XX = Indeterminate
State 466 Direction PC
HI 8 DCD ---->---- DCD 8
XX 3 TXD ---->---- RXD 3
XX 2 RXD ----<---- TXD 2
HI 6 DSR ----<---- DTR 20
LO 7 GND ---<->--- GND 7
HI 20 DTR ---->---- DSR 6
DC 4 CTS ----<---- RTS 4
XX 5 RTS ---->---- CTS 5
HI 18 +5V
DB-25 DB-25
DC = Do Not Care
XX = Indeterminate
Table 2