Yaskawa J7 Drive User Manual
Page 60
5-25
Continued
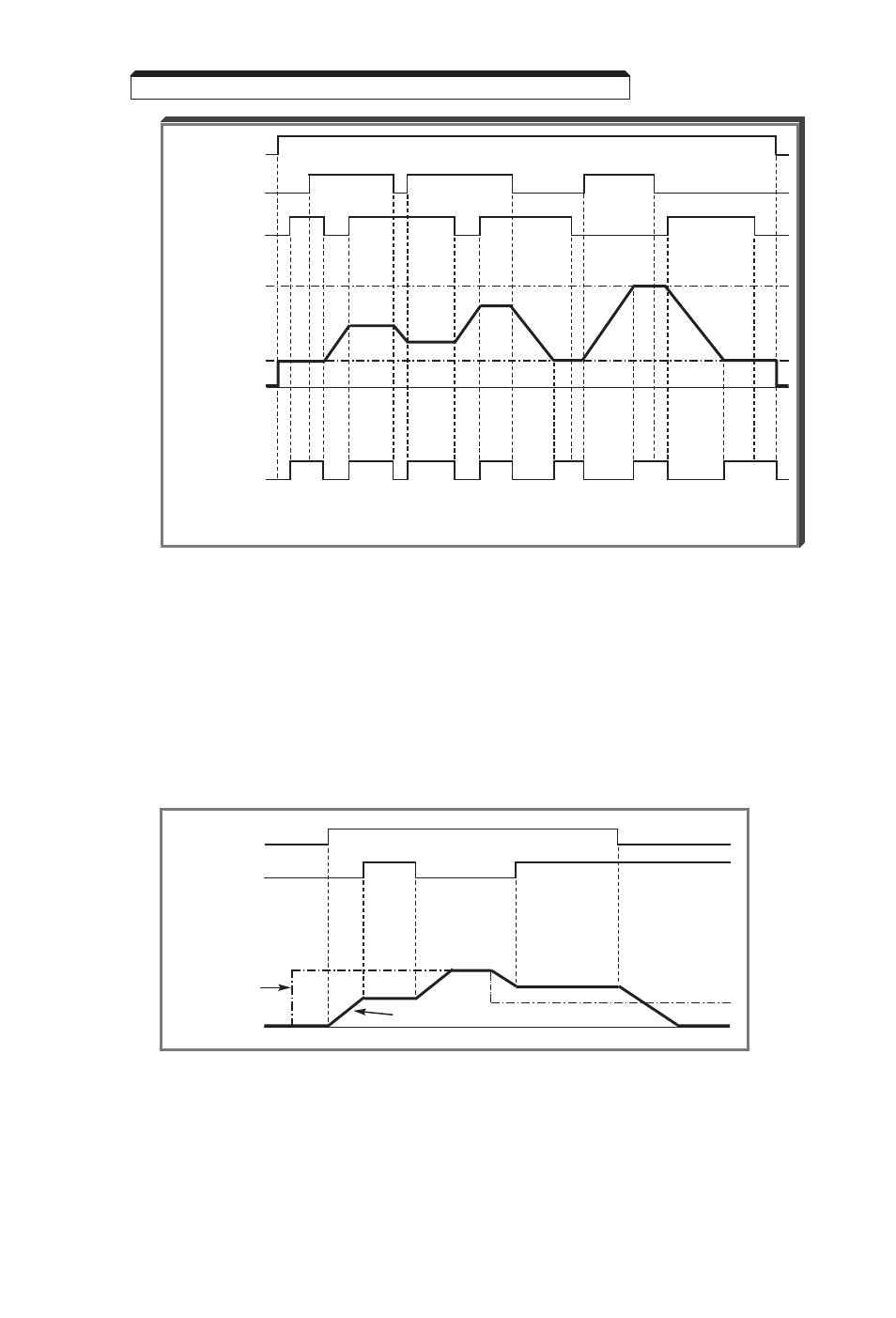
FWD RUN
(S4) UP
COMMAND
(S5) DOWN
COMMAND
UPPER
LIMIT SPEED
LOWER
LIMIT SPEED
OUTPUT
FREQUENCY*
"SPEED AT SET
FREQUENCY"
SIGNAL
* U = UP (Accel) status; D = DOWN (Decel) status; H = HOLD (constant speed) status;
U1
= At Upper Limit Speed; D1 = At Lower Limit Speed
Up/Down Frequency Setting Timing
D1
D
D
D
H
H
H
H
H
H
H
U1
U
U
U
D1
D1
5.17 MULTI-FUNCTION INPUT TERMINALS (Term. S1-S5)
F.
Data
16
: Accel/Decel Hold
By programming data " 16 " into one of the multifunction input parameters (
n36
thru
n39
), one of
the multi-function input terminals (S1 thru S5) becomes a HOLD command input. As long as the
HOLD command is present, accel and decel are in a prohibit state, and the output speed is held at
the level it was at the time the HOLD command was input. When the HOLD command is removed
while the system is still in Run condition, accel or decel will again become active to allow output to
reach set speed. If Stop is initiated while the HOLD command is present, the prohibit state is
cancelled and the system enters stop operation.
HOLD Function Timing
FWD RUN
HOLD CMD
SPEED REF.
OUTPUT SPEED