Outputs – Yaskawa Sigma-5 with CANopen over EtherCAT User Manual
Page 8
Product: TwinCAT, Sigma-5 with CANopen over EtherCAT option
Doc#: TM.SGDV.01
Title: Sigma-5 EtherCAT Function Blocks for TwinCAT
Doc#: TM.SGDV.01
Yaskawa America, Inc. Drives & Motion Division
©2011
January 6, 2011
Page 8 of
22
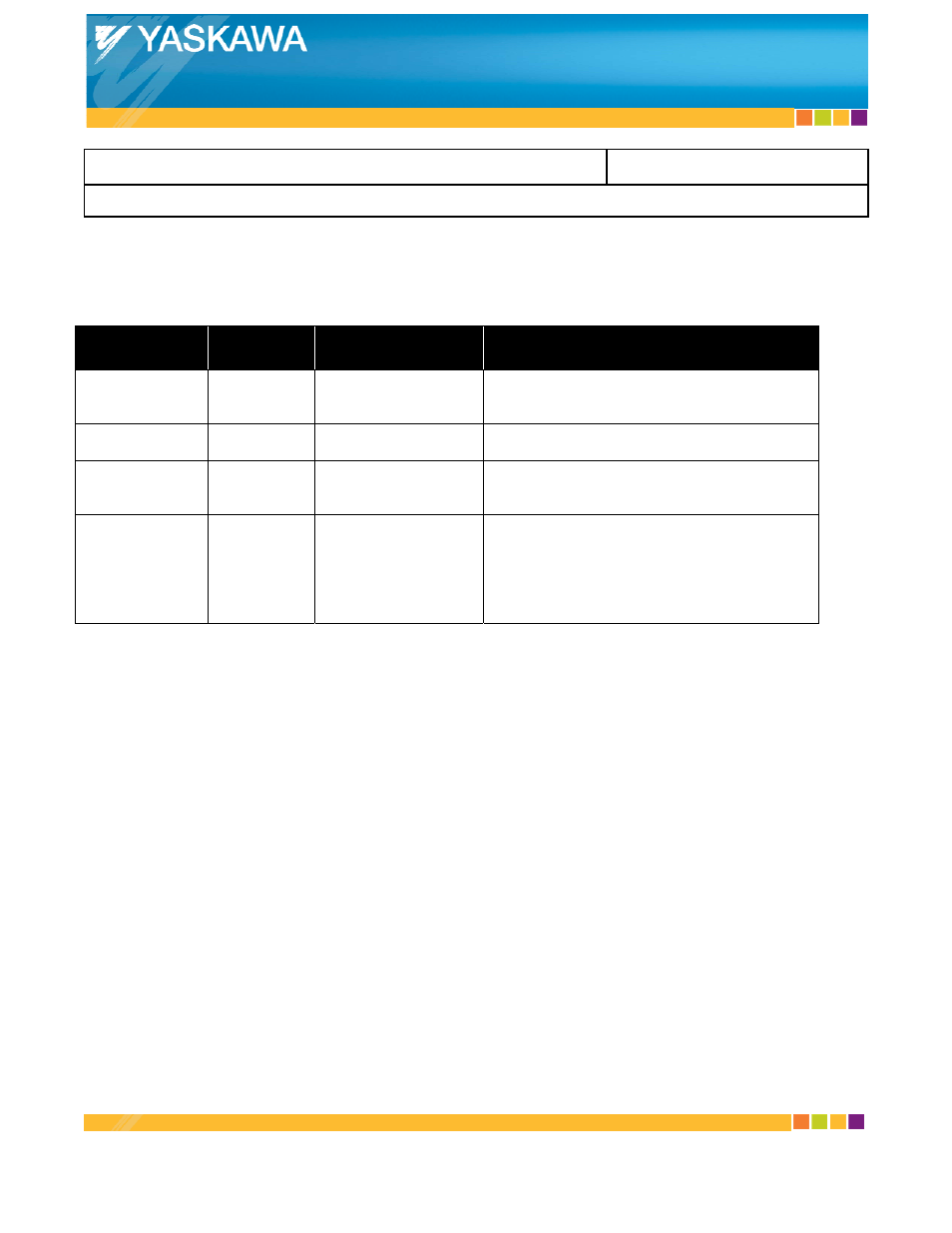
5. Outputs
Outputs for Y_StoreParameters, Y_WriteParameters, and Y_AbsoluteEncoderReset
Variable
Name
Data Type
Default Value
Function
bDone BOOL
False
Set high when the commanded action has
been completed successfully. This output is
reset when bExecute goes low.
bBusy BOOL
False
Set high upon the rising edge of bExecute,
and reset if bDone or bError is true.
bError BOOL
False
Set high if an error has occurred during the
execution of the function block. This output is
cleared when bExecute goes low.
nErrorID UDINT
0
If bError is true, this output provides the Error
ID. This output is reset when bExecute goes
low. 41xx errors are in this documentation.
All other errors are from TwinCAT function
blocks and can be found in TwinCAT
documentation.