Encoder connectors, Jumper settings – Altera Multiaxis Motor Control Board User Manual
Page 17
Functional Description
Page 17
Multiaxis Motor Control Board
February 2014
Altera Corporation
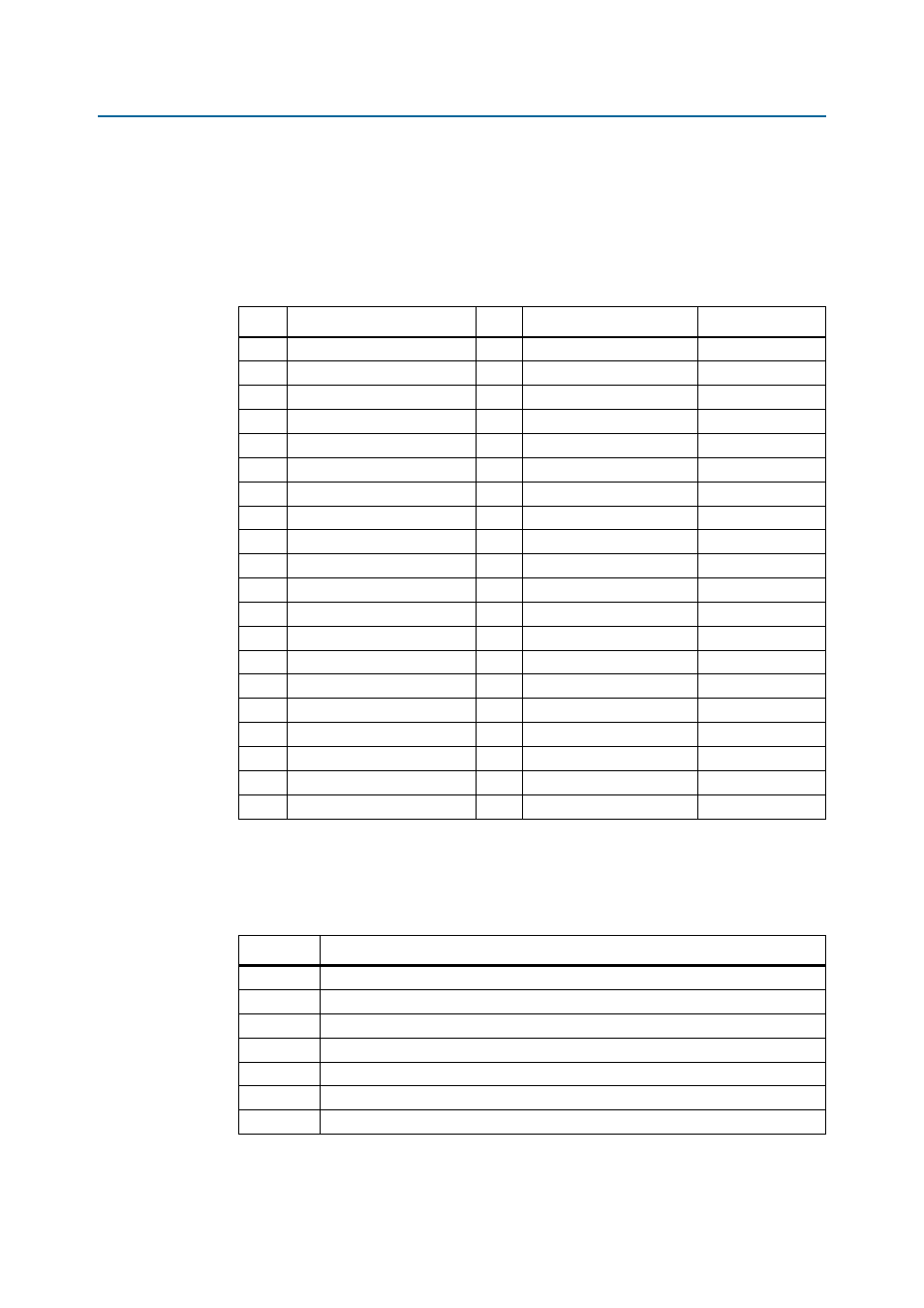
Encoder Connectors
Table 7
lists the pin assignments for each channel. Not every encoder type requires all
connections to be made.
You may link the TX and RX pairs on pins 16, 17 and 18, 19 by jumpers on the
Multiaxis Motor Control Board to create a single bidirectional data pair.
Jumper Settings
Table 8
lists the jumpers.
Table 7. Encoder Connector Pin Assignments
Pin
Signal
I/O
Encoder Type(s)
SIgnal
1
Supply
—
—
—
2
DRV_x_SIN_DRV_P
O
Resolver
Stimulus+
3
DRV_x_SIN_DRV_N
O
Resolver
Stimulus–
4
DRV_x_RESOLVER_COS_N
I
Resolver
Cosine- signal
5
DRV_x_RESOLVER_COS_P
I
Resolver
Cosine+ signal
6
DRV_x_RESOLVER_SIN_N
I
Resolver
Sine- signal
7
DRV_x_RESOLVER_SIN_P
I
Resolver
Sine+ signal
8
DRV_x_HALL_QUAD_A_P
I
Hall, Quadrature
Channel A+
9
DRV_x_HALL_QUAD_A_N
I
Hall, Quadrature
Channel A–
10
DRV_x_HALL_QUAD_B_P
I
Hall, Quadrature
Channel B+
11
DRV_x_HALL_QUAD_B_N
I
Hall, Quadrature
Channel B–
12
DRV_x_HALL_QUAD_C_P
I
Hall, Quadrature
Channel C+
13
DRV_x_HALL_QUAD_C_N
I
Hall, Quadrature
Channel C–
14
CLK_DRV_x_SER_P
O
EnDat/BiSS/HIPERFACE
Clock+
15
CLK_DRV_x_SER_N
O
EnDat/BiSS/HIPERFACE
Clock–
16
DRV_x_SER_DATA_TX_P
O
EnDat/BiSS/HIPERFACE
TX+ data
17
DRV_x_SER_DATA_TX_N
O
EnDat/BiSS/HIPERFACE
TX– data
18
DRV_x_SER_DATA_RX_P
I
EnDat/BiSS/HIPERFACE
RX+ data
19
DRV_x_SER_DATA_RX_N
I
EnDat/BiSS/HIPERFACE
RX– data
20
Ground
—
—
—
Table 8. Jumpers
Jumper
Function
J3
Channel 0 encoder power supply.
J4
Channel 0 encoder power supply.
J5
Channel 0 encoder RS485 data configuration.
J6
Channel 0 encoder RS485 data configuration.
J7
Channel 0 encoder RS485 data configuration.
J8
Channel 0 encoder RS485 data configuration.
J10
Channel 0 encoder interface selection.