Workcell obstacles, Robot configuration page – Adept DeskTop 4.3 User Manual
Page 132
Adept DeskTop 4.3 - Online Help
132
Robot Configuration Page
When the robot node is selected in the system tree view, the Robot Configuration pages display
in the Configuration View. The view includes three pages: Workcell Obstacles,
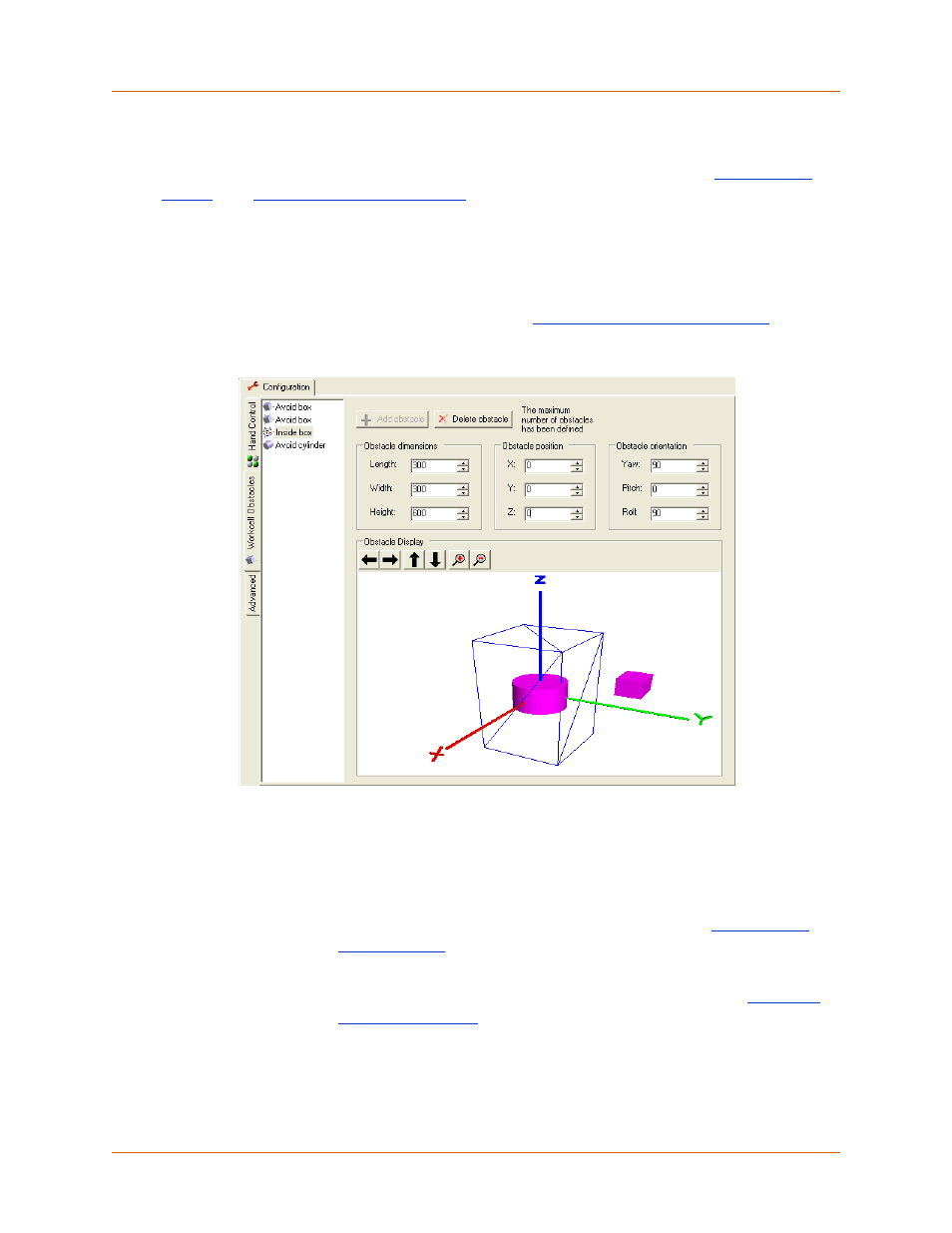
Workcell Obstacles
The Workcell Obstacle page, displayed below, allows you to view, define, and edit workcell
obstacles. The Obstacle display requires that you have DirectX9, or later, installed.
For details on displaying and defining obstacles, see
Manage Obstacles in the Workcell
.
For details on user interface elements see the Field Descriptions below.
Field Descriptions
Tabs
Hand Control
Clicking the Hand Control tab displays the configuration page for
hand control open and close signals. For details, see
Advanced
Clicking the Advanced tab displays the configuration page to
configure E-STOP and calibration options. For details, see
.
Obstacle Management