4 gimbal angle y (sdo index 2044 = 3), 5 explanatory example – ifm electronic JN2100 v.2.2.0 User Manual
Page 21
UK
Inclination sensor JN
21
be detected by the inclination sensor. In this condition the "inclination value lateral"
is insignificant. In practice, the "inclination value lateral" will vary very strongly
when it is close to this condition even if there is only little movement.
8.4 Gimbal angle Y (SDO index 2044 = 3)
This setting corresponds to the setting described in 8.3 with the difference that the
order of the two rotations is now inverted.
In this option the measured object is first rotated about its X axis with the angle
[°] "inclination value lateral". The measured object is then rotated about the Y axis
(which is now inclined) with the angle value [°] indicated by the "inclination value
longitudinal" of the sensor.
As a result of this the measured values of the gimbal angle X and the gimbal angle
Y are identical as long as the measured object is only rotated about one of the
sensor's axes. The measured values of the two options do not differ until a general
rotation is made about the two sensitivity axes.
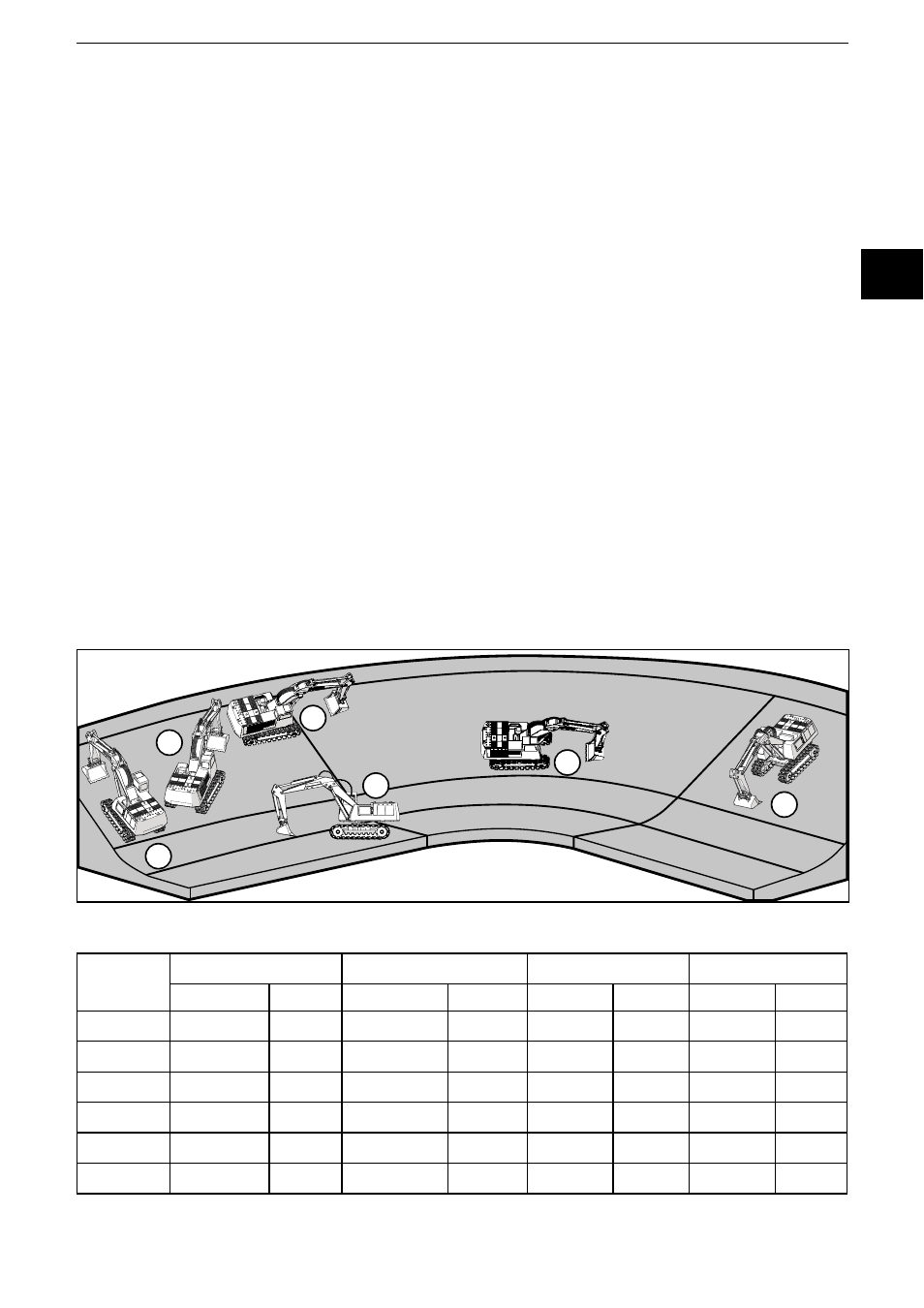
8.5 Explanatory example
The different angle definitions will be illustrated using a simple example. An
excavator moves up and down an embankment (illustration). The embankment is
angled at 30°. The inclination sensor is installed so that the positive Y axis of the
sensor shows in driving direction of the excavator.
1
2
3
4
5
6
Excavator
position
Perpendicular angle
Euler
Gimbal X
Gimbal Y
Longitudinal
Lateral
Longitudinal
Lateral
Longitudinal
Lateral
Longitudinal
Lateral
1
0°
0°
0°
Undefined
0°
0°
0°
0°
2
0°
-30°
30°
0°
0°
-30°
0°
-30°
3
20°
-20°
30°
45°
20°
-22°
22°
-20°
4
30°
0°
30°
90°
30°
0°
30°
0°
5
30°
0°
30°
90°
30°
0°
30°
0°
6
0°
30°
30°
180°
0°
30°
0°
30°