6 rs422 commands, 1 flp4.0 required commands, Frs-hd-cho rev. 9 – Nevion FRS-HD-CHO User Manual
Page 29: Control
FRS-HD-CHO
Rev. 9
nevion.com | 29
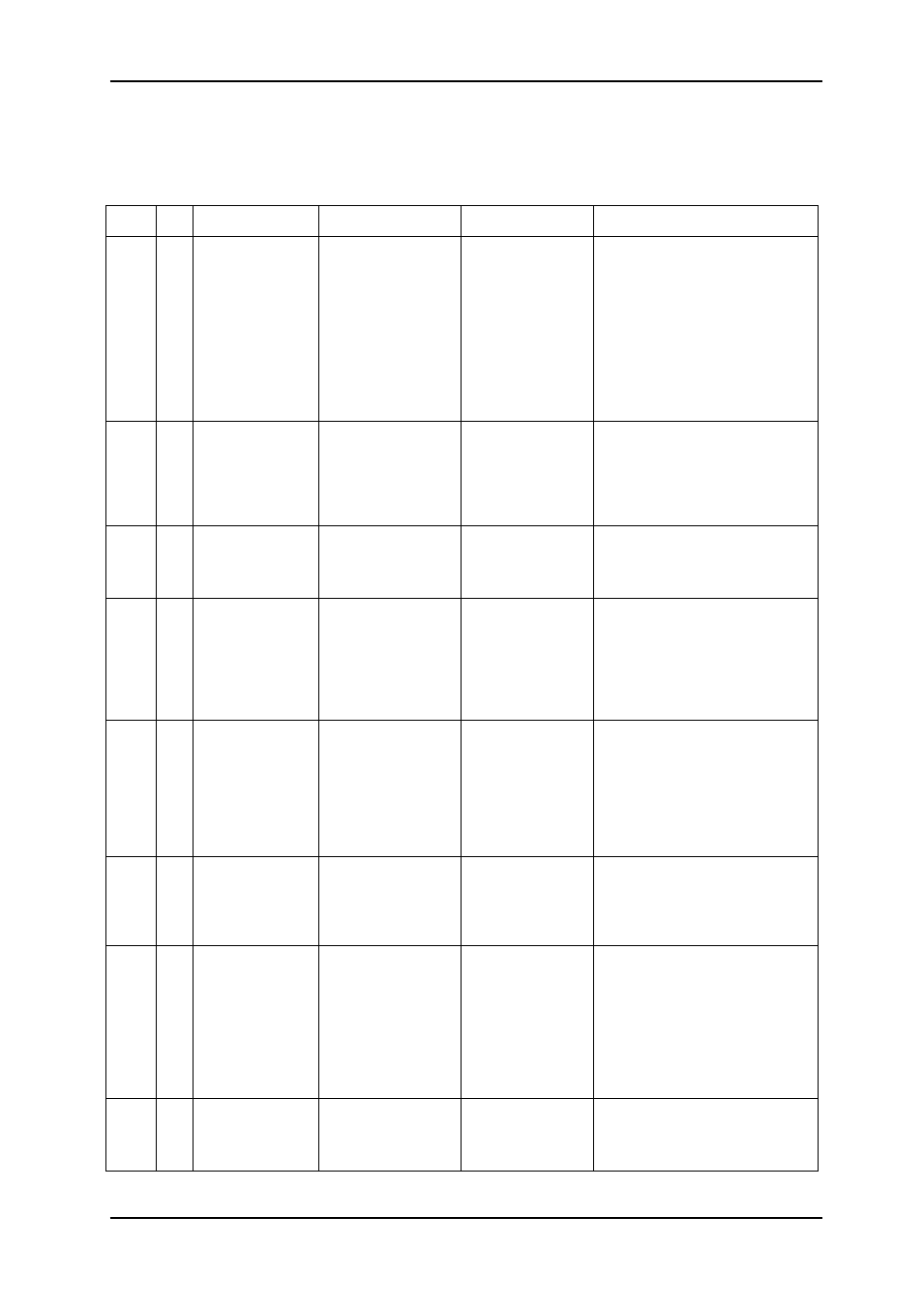
6 RS422 commands
6.1 FLP4.0 required commands
Block Blk#
Commands
Example
Response
Control
-
-
?
?
product name\
SW rev n.m\
FW rev r.s\
protocol ver 4.0\
Hello command.
Note 1: No other commands will be
available until the card has received
this hello.
Note 2: This command will also
enable checksums.
Note 3: Cards are designed to be hot-
swappable. To sync with the start of a
new command, the cards will wait for
a <lf> character before looking for a
valid command.
conf
0
-
conf 0
*too long to list*
Configuration settings
Retrieves the card's configurable
settings. Each addressable block is
represented by a single line. Dynamic
status may be included in response,
but is usually reported in info only.
-
-
info
info
*too long to list*
Dynamic status info
Blocks with static settings only will
usually not be included, see conf
above.
-
-
chk off
chk off
ok
Checksum off
If issued twice in succession, this
command will disable checksums.
Note: Responses will still have the
checksums appended.
NOTE1: ? command turns the
checksum back on
-
-
locate on <seconds>
locate off
locate on 3
locate off
ok
Card locator
This command will cause all the
LEDs to flash for a user specified
number of seconds. If omitted, the
value <seconds> will be set to a
default of 120 seconds. The flashing
can be terminated at any time with
locate off.
-
-
address
address
address <address>
Card address
This command will check and update
the card's current rack and slot
address, which is normally only done
at start-up.
-
-
filename
filename frshdcho-0-
105.ffw
filename frshdcho-0-
100.mfw
<name>'.'<extension> Firmware upgrades
The <name> part must match the
card's hardware and include a revision
number, and the extension must be
either 'ffw' for FPGA firmware or
'mfw' for microcontroller firmware.
After running this command the board
will wait for the firmware in Intel-hex
format.
-
-
fin
fin
ok
Finalize
Finalize the programming of the
microcontroller. See description of the
uC bootloader (separate document).