Yaskawa L1000E AC Drive CIMR-LEA User Manual
Page 133
5 Troubleshooting
YASKAWA TOEPYAIL1E01A YASKAWA AC Drive L1000E Quick Start Guide
133
Tr
ou
blesh
oot
ing
5
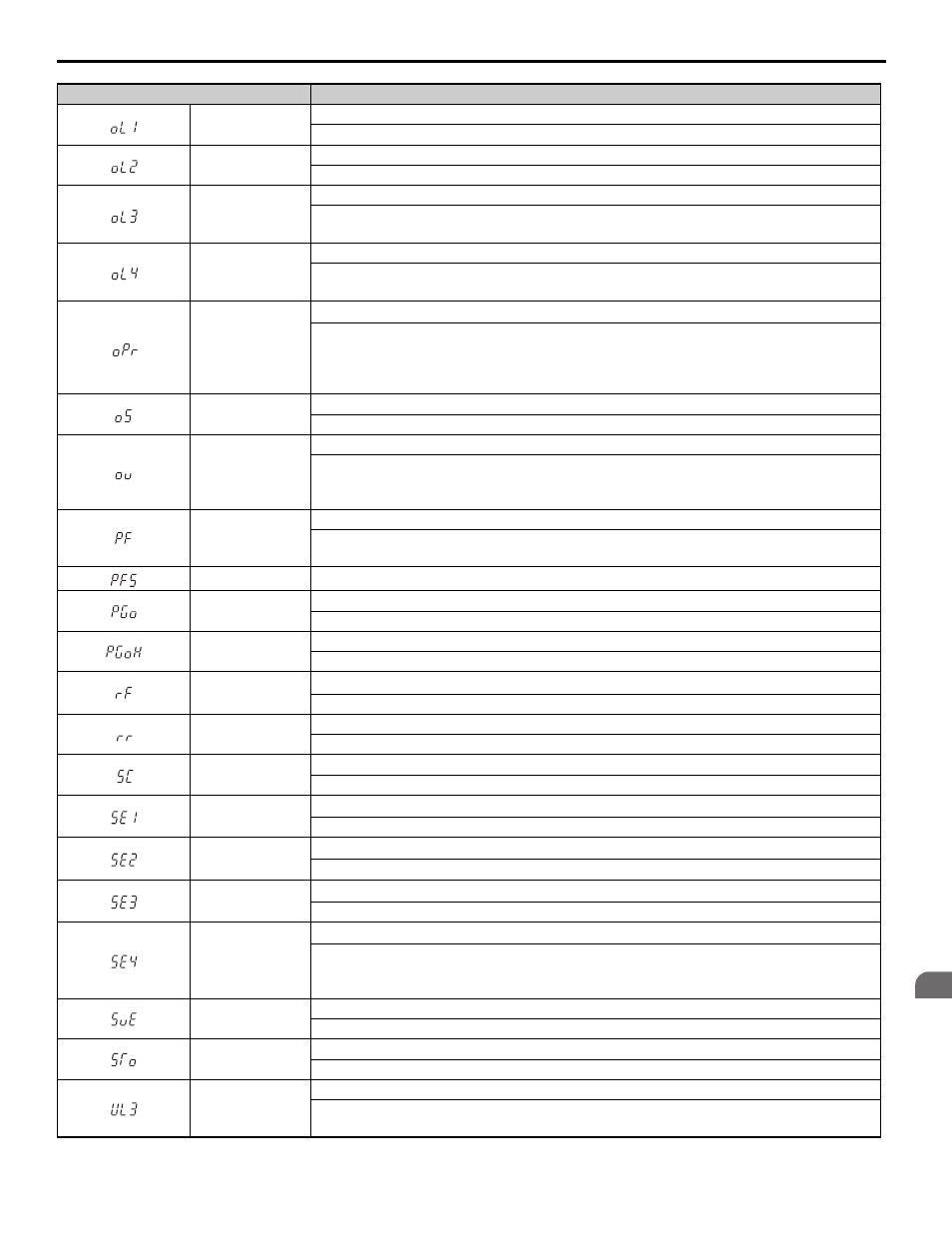
oL1
Motor Overload
The electronic motor overload protection tripped.
oL2
Drive Overload
The thermal sensor of the drive triggered overload protection.
oL3
Overtorque Detection 1
The current has exceeded the value set for torque detection (L6-02) for longer than the allowable
time (L6-03).
oL4
Overtorque Detection 2
The current has exceeded the value set for Overtorque Detection 2 (L6-05) for longer than the
allowable time (L6-06).
oPr
External Digital Operator Connection Fault
• The external operator has been disconnected from the drive.
Note: An oPr fault will occur when all of the following conditions are true:
• Output is interrupted when the operator is disconnected (o2-06 = 1).
• The Up/Down command is assigned to the operator (b1-02 = 0 and LOCAL has been selected).
oS
Overspeed
The motor speed feedback exceeded the F1-08 setting.
ov
DC Bus Overvoltage
Voltage in the DC bus has exceeded the overvoltage detection level.
• For 200 V class: approximately 410 V
• For 400 V class: approximately 820 V
PF
Input Phase Loss
Drive input power has an open phase or has a large imbalance of voltage between phases. Detected
when L8-05 = 1 (enabled).
PF5
Rescue Operation Power Supply Deterioration Error
PGo
Encoder Disconnected (for Control Mode with Encoder)
No encoder pulses are received for longer than the time set to F1-14.
PGoH
Encoder Disconnected (detected when using an encoder)
Encoder cable is not connected properly.
rF
Braking Resistor Fault
The resistance of the braking resistor being used is too low.
rr
Dynamic Braking Transistor Fault
The built-in dynamic braking transistor failed.
SC
IGBT Short Circuit
Short Circuit or Ground Fault is detected
SE1
Motor Contactor Response Error
Motor contactor does not respond within the time set to S1-10 (Run Command Delay Time).
SE2
Starting Current Error
The output current was lower than 25% of the motor no-load current at start.
SE3
Output Current Error
The output current was lower than 25% of the motor no-load current during operation.
SE4
Brake Feedback Error
The input terminal set for “Brake feedback” (H1-
= 79) or “Brake feedback 2” (H1-
= 5B)
did not respond within the SE4 error time set to S6-05 after an output terminal set for “Brake
release” (H2-
= 50) closed.
SvE
Position Lock Error
Position deviation during Position Lock.
STo
Motor Pull Out or Step Out Detection
Motor pull out or step out has occurred. Motor has exceeded its pull out torque.
UL3
Undertorque Detection 1
The current has fallen below the minimum value set for torque detection (L6-02) for longer than the
allowable time (L6-03).
Digital Operator Display
Fault Name