4 start-up programming – Yaskawa L1000E AC Drive CIMR-LEA User Manual
Page 87
4 Start-Up Programming
YASKAWA TOEPYAIL1E01A YASKAWA AC Drive L1000E Quick Start Guide
87
St
ar
t-
Up
Pr
og
ra
m
m
in
g
4
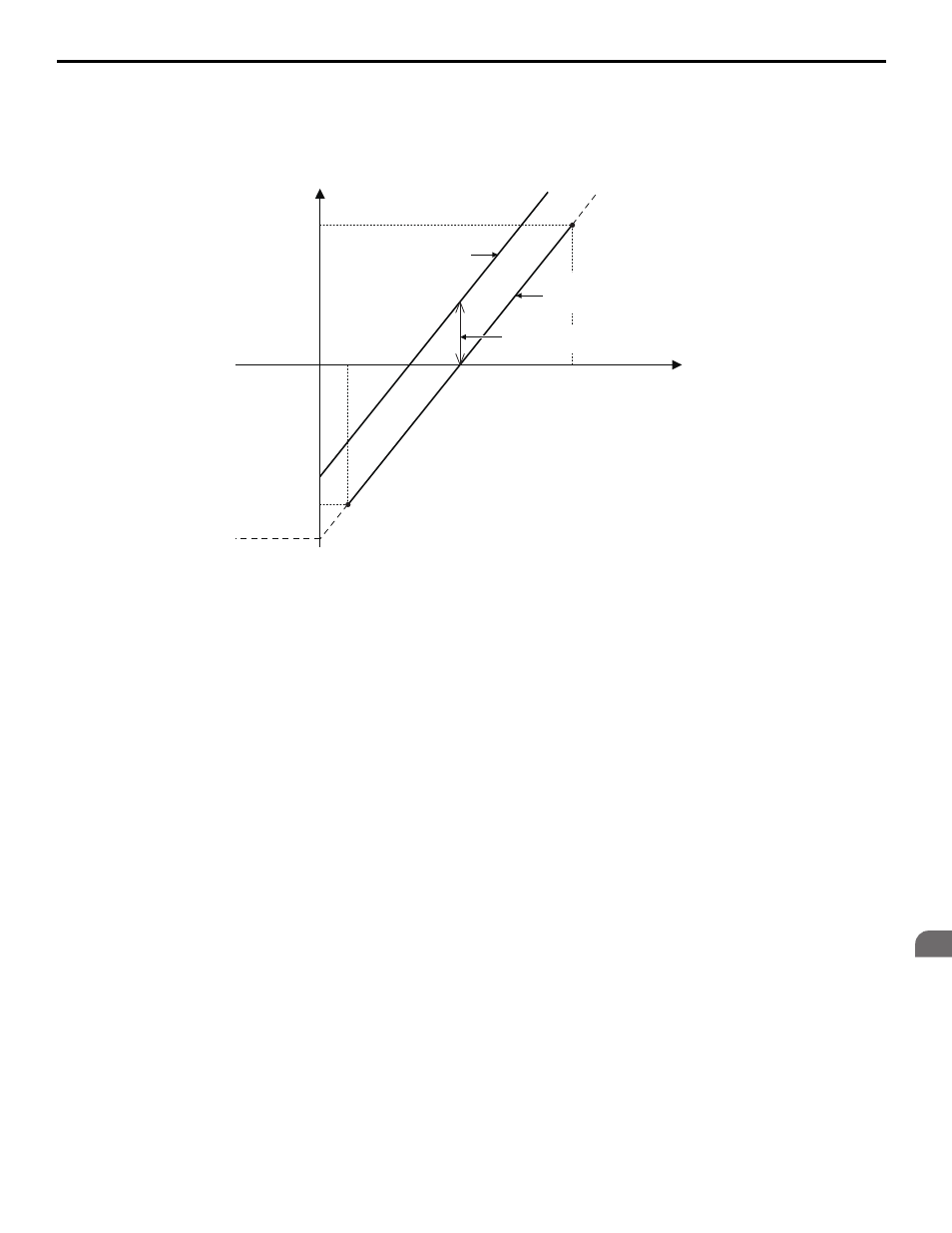
After setting load conditions 1 and 2, perform a trial run. If required, parameter S3-12 can be set up to add a bias to the
load sensor input when riding in a Down direction (default: 0.0%, same torque compensation characteristics in up and
down direction).
illustrates the effect of torque compensation on the settings of S3-12 and S3-27 through S3-
30.
Figure 48
Figure 53 Torque Compensation at Start for the Elevator in Up and Down Direction
S3-30
S3-27
S3-28
(Torque Compensation
Value with Load Condition 2)
Torque Compensation
at Start for the Elevator
in the Down Direction
S3-29
(Analog Input
from Load Sensor
with Load
Condition 1)
(Torque Compensation Value
with Load Condition 1)
During Load Condition 2
Torque Compensation
at Start for the Elevator
in the Up Direction
S3-12 (Starting Torque
Compensation Bias during Lowering)
(Analog input
from Load Sensor
with Load Condition 2)
Analog Input Voltage (V)
During Load Condition 1
0