0 general, Worcester actuation systems – Flowserve DFP17 User Manual
Page 4
4
DataFlo Digital Electronic Positioner DFP17 Installation, Operation and Maintenance Instructions
WCAIM2037
Flow Control
Worcester Actuation Systems
1.0 GENERAL
1.1 Basic Design
The Worcester/McCANNA DataFlo Digital Electronic Positioner
(DFP17) was designed for use with the Worcester/McCANNA Series
75 electric actuators. However, it may also be used with other
actuators or electrically operated rotary devices, provided the
specified load parameters as given in Section 5.3 are not exceeded.
a CAUTION: This positioner is sensitive to electrical noise; please
see Section 1.2.
PLEASE READ THIS SECTION
A.
The 4–20 mA signal input circuit of both the AC and DC Digital
Positioner board is protected with a 62 mA fuse (F1). The fuse is
used to protect the input circuit from an excessively high
voltage. The fuse used in the input circuit is a Littlefuse PICO II
very fast acting fuse rated at 62 mA.
All DC Digital Positioner boards also use a standard 1
1
/
4
", 250 V,
3 A fuse (F2) to protect the circuit board and the power source in
case of a fault in the DC motor driver integrated circuit on the
circuit board.
a
CAUTION: It is important that the DC voltage power source
be properly connected to the actuator’s terminal strip.
Terminal one (1) of this strip is to have the negative or
common wire connected to it. Terminal two (2) is to have
the positive wire connected to it.
NOTE: All wiring to terminal strip should be inserted only to the
midpoint of terminal strip.
B.
The Digital Positioner board is designed to receive a floating
current input signal. This allows several pieces of equipment to
be operated from the same current loop while at the same time
remaining electrically independent of each other. A floating input
signal means that the current input signal should not be
referenced to the circuit board ground. This is especially
important with DC powered circuit boards. The board power
source must have a ground independent from that of the signal
source.
C.
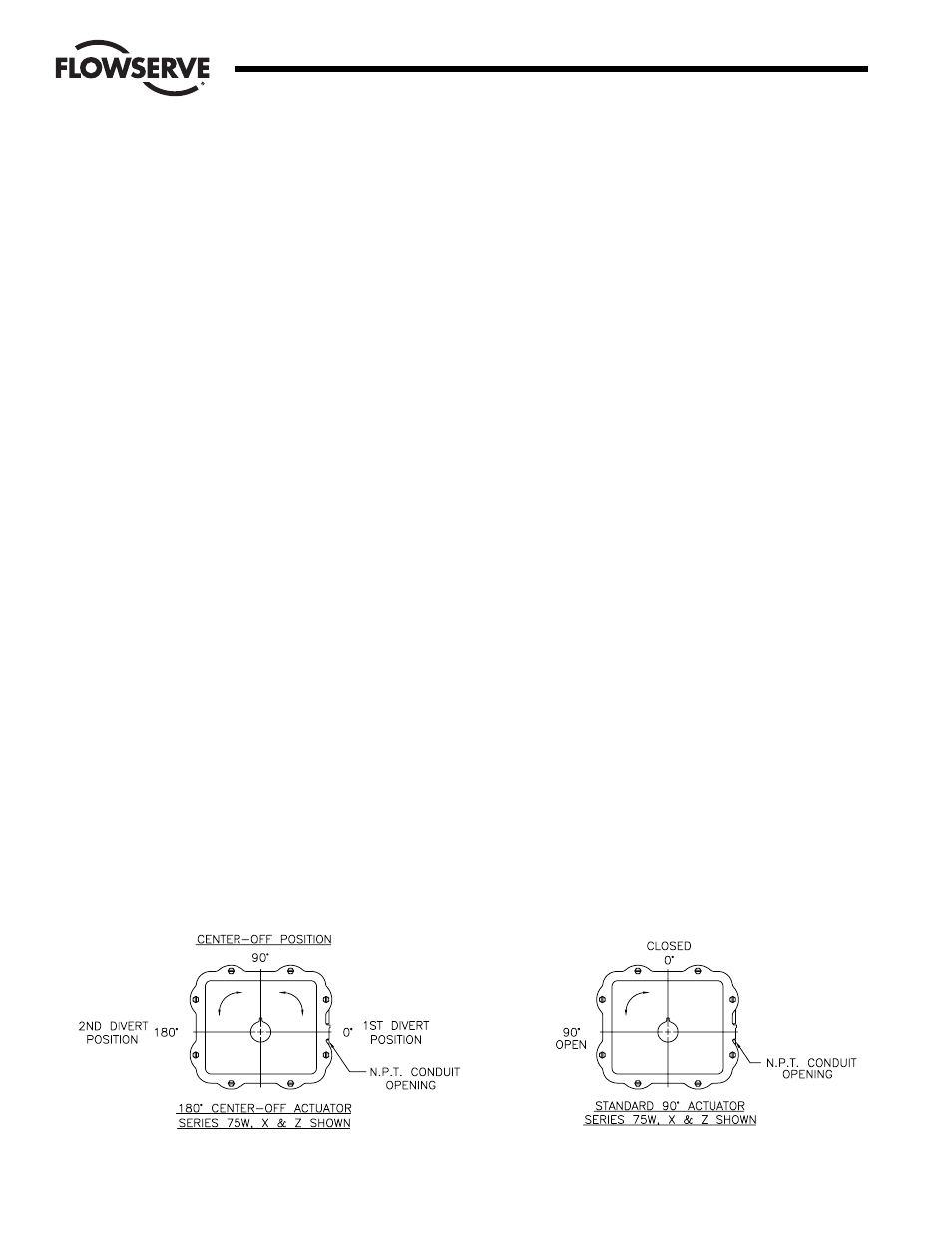
The Digital Positioner board can be set up in several ways for
normal operation. The board is designed to control in 90˚
quadrants only (with alternate potentiometer gearing, 180˚ of
rotation is available). The number of quadrants over which the
board will control is determined by the number of teeth on the
feedback pot pinion gear.
The standard setup is 4 mA for full clockwise rotation - i.e., 0˚
and 20 mA for full counter-clockwise Rotation - i.e., 90˚ or 180˚.
D.
Quite often when we receive an actuator for repair, we find that
the only thing wrong with the unit is that the feedback
potentiometer is out of calibration. It is very important that the
feedback pot be properly calibrated for correct operation of the
positioner board. It is also very important that the actuator shaft
not be rotated out of the quadrant for which the feedback pot
has been calibrated. Whenever you have a problem with the
positioner calibration, always check the feedback pot calibration
first. This must be done with no power applied to the circuit
board. If the actuator is in the full clockwise position, check the
resistance between the purple and white/black potentiometer
leads. The reading should be 80-90 ohms. If it is not, rotate the
face gear until the proper reading is achieved. If the actuator
happens to be in the full counter-clockwise position then check
the resistance between the green and white/black potentiometer
leads. If necessary adjust the face gear for an 80-90 ohm
reading.
NOTE: It is not necessary to loosen or remove face gear snap
ring(s) (if present) to rotate gear, it is a friction fit. For gears that
do have snap rings, and if for any reason the snap ring(s) are to
be removed, do not over stretch them; use the minimum
opening to allow them to slip over the gear.
Figure 1 – Quadrants of Operation