Airmar PB200 User Manual
Page 28
PB200 WeatherStation User Manual revision 1.000
Proprietary and Confidential
22
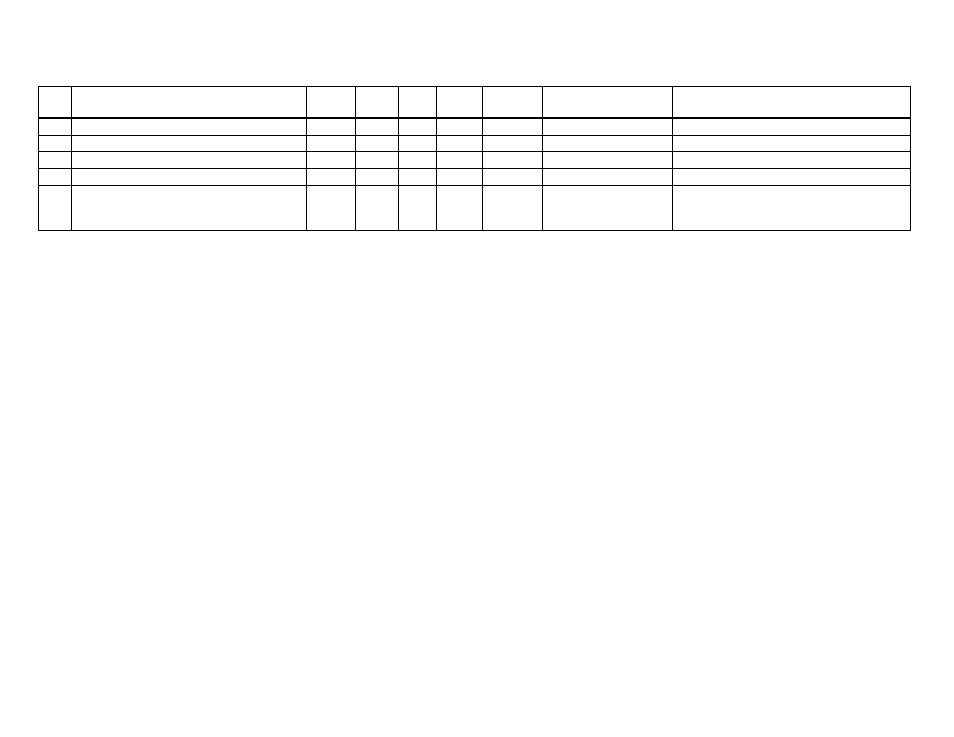
Field
#
Name
Request
Param. DD
DF
Type Resolution
Value
Remark
12 Y-axis Linear Offset
No
N/A DF58 int16
.01
Teslas
Default 0, range -32000 to +32000
13 Z-axis Linear Offset
No
N/A DF58 int16
.01
Teslas
Default 0, range -32000 to +32000
14 X-axis Angular Offset (Unused)
No
N/A DF58 int16
.1
Degrees
Default 0, range 0 to 3600
15 Pitch and Roll Damping
No
N/A DF58 int16
.05
Seconds
Default 30, range 0 to200
16 Compass/RateGyro Damping
No
N/A DF58 int16
.05
Seconds
Default -30, range -2400 to 2400, negative
numbers indicate that the rate gyro is to be used
in compass computations.
Notes
This PGN can be used to manually initiate a user calibration sequence for the internal compass sensor. There is an alternative to issuing this PGN to start user compass calibration,
called AutoCal. AutoCal is intended for users who do not have access to a user interface which allows them to manually start user compass calibration.
This PGN is transmitted in response to a PGN 126208 Request Group Function message. Fields 1, 3, and 4 must each be fully specified in the request in order for this PGN to be
transmitted.
This PGN does not respond to ISO Requests (PGN 59904).
Queries work with access level 0, all other functions require at least access level 1.
Calibration needs to be done in calm seas, away from other boats or ferrous objects (structures or aids to navigation). Trying to turn a 2-3 minute circle in strong currents or
congested areas will be difficult, if not hazardous.
The user calibration sequence for the PB200 is as follows:
1.
The weather station instrument is installed on the vessel. The unit under test is powered up.
2.
Manual Start: The access level is set to 1.
AutoCal Start: Access level not required.
3.
Manual Start: PGN 126208 Command Group Function message is sent Fields 1, 3, 4 and 5 must each be fully specified, field 5 is set to 1 (GO) to initiate user calibration
mode.
AutoCal Start: Within 2 minutes of applying power to the weather station instrument being calibrated, the vessel must start a slow (2-4 knots) circular turn. If it completes
a full circle within 2-3 minutes, AutoCal will enter the user compass calibration procedure (See steps 4-7).
4.
During the user calibration process, the vessel is rotated slowly (driven at 2-4 knots, completing a circle within 2-3 minutes), while the sensor collects data. Once the
weather station instrument
has determined that enough data has been collected, it calculates the coefficients, and sets the status to 1 for PASS or 2 - 4 for FAIL.
5.
During the user calibration process, PGN 126208 can be used to request PGN 126720-33 to obtain status at any time. While calibration is running, the status will be 5 for
INPROGRESS. Once it has completed, the status will be 1 for Passed or 2-4 for Failed.
6.
If PASS was transmitted, then the offsets that are now in use and saved in EEPROM are the newly calculated ones.