Yaskawa MP2000iec Series User Manual
Page 5
MP2000iec Series QRG Rev 3.3
1.8 Save Project Archive (Backup controller and servo parameters)
KEY INFORMATION
The project archive contains the critical data for the controller and servopacks.
Save this archive at time of machine comissioning and after any change is made.
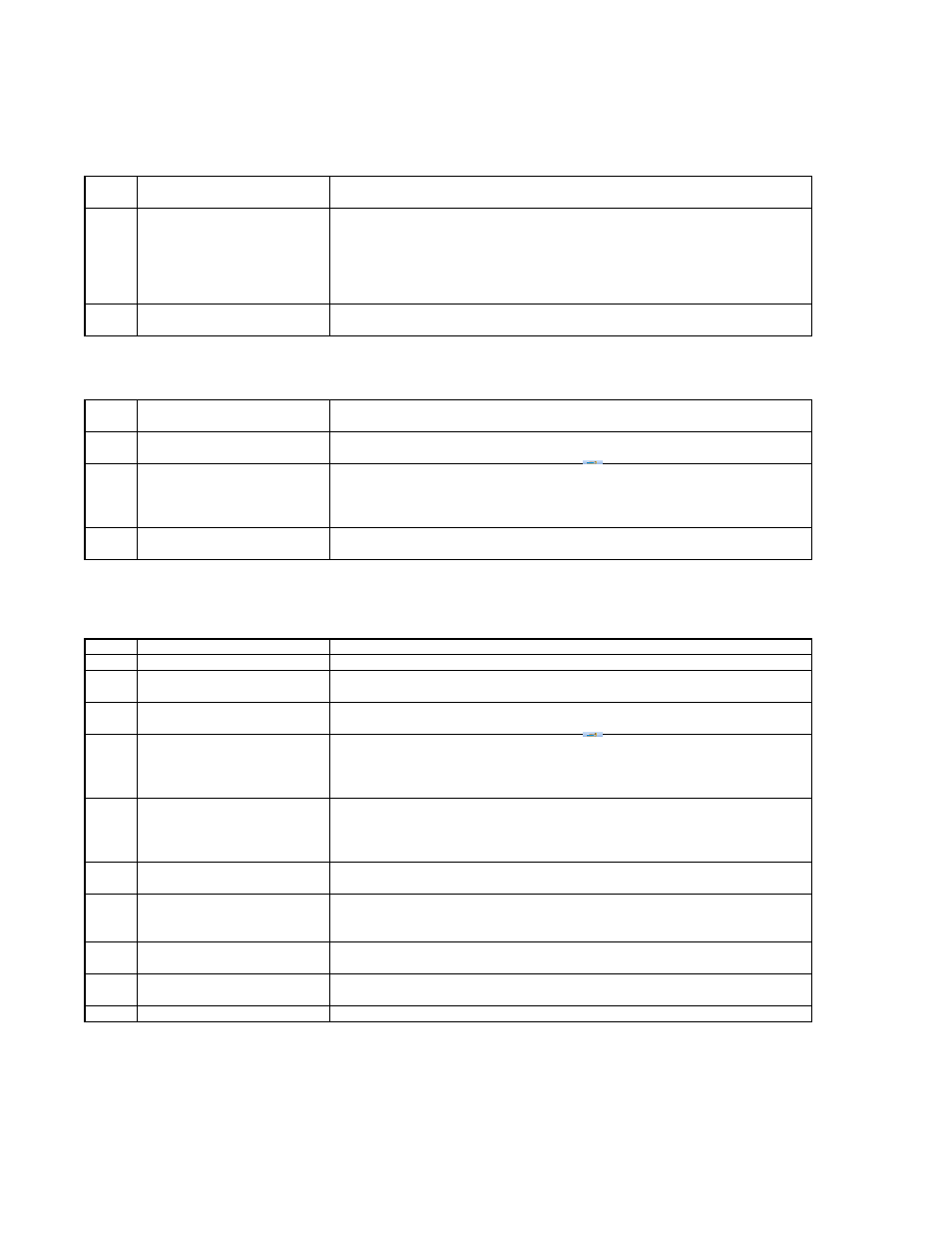
Step
Description
Detail
1
Login to Webserver
See Procedure. Login: Admin. Password: MP2300S, MP2600, MP3200, MP3300
2
Verifiy Drive Parameters
Drive Parameters -> User Parameters, "verify" each axis. Verify compares
parameters in the archive with the current parameters in the servo. IF Verify is
successful, proceed to next step. IF Verify is not successful, then the archive drive
parameters do not match the current parameters in the servos. Use MotionWorks
IEC hardware configuration to import parameters to project archive.
3
Save archive from controller
Project Archive -> "Browse" and select the project archive file. Then "Receive from
Controller". Navigate to directory on PC to save *.zip file.
1.9 Load Project Archive
KEY INFORMATION
This procedure only sends the controller program and configuration.
Step
Description
Detail
1
Login to Webserver
See Procedure. Login: Admin. Password: MP2300S, MP2600, MP3200, MP3300
2
Obtain the project archive file
*.zip is the file extention. The project archive must have been previously saved
from an existing controller. It can also be created by MotionWorks IEC.
3
Send archive to controller
Project Archive -> "Browse" and select the project archive file. Select "Clean Install"
to delete any previous archive files. Then "Send to Controller", "OK". Wait 1-2
minutes. When complete the button changes from "Wait" back to "Send to
Controller".
4
Reboot
Under "Maintenance" -> reboot, then "Reboot Controller" and "OK" to confirm. Wait
45 seconds for reboot.
1.A
Startup from Project Archive
KEY INFORMATION
Project Archive contains all required data including servo parameters.
Archive is not active until reboot.
Step
Description
Detail
1
Set up the controller
See procedure 1.0, for new controllers.
2
Stop all motion
Operate the machine according to existing program.
3
Login to Webserver
See Procedure. Login: Admin. Password: MP2300S, MP2600, MP3200, MP3300
4
Obtain the project archive file
*.zip is the file extention. The project archive must have been previously saved
from an existing controller. It can also be created by MotionWorks IEC.
5
Send archive to controller
Project Archive -> Browse, select the project archive file. "Clean Install" to delete
any previous archive files. Then "Send to Controller", "OK". Wait 1-2 minutes.
When complete the button changes from "Wait" back to "Send to Controller".
6
Send Drive Parameters
Drive Parameters -> User Parameters, "verify" each axis. Verify compares
parameters in the archive with the current parameters in the servo. "Write" and
"OK" to send parameters from archive to servo. Takes just a couple seconds to
write.
7
Reboot #1
Under "Maintenance" -> reboot, then "Reboot Controller" and "OK" to confirm. Wait
45 seconds for reboot.
8
Initialize Absolute Encoders to
clear A.810, A.820, A.CC0
Machine Operations. Determine which axis number has the alarm. Drive PN tab ->
pull down to select the axis number. Click "abs encoder init" then "Multiturn
Reset". Clears alarms A.810 and A.CC0.
9
Reboot #2
Under "Maintenance" -> reboot, then "Reboot Controller" and "OK" to confirm. Wait
45 seconds for reboot.
10
Zero-Set / Home and machine
calibration
Follow steps according to application programming of machine. Home offsets for
absolute encoder are stored in SRAM of controller .
Page 5 of 15