Changing the feed forward repetitions and execute, Set feed/flip forward turns and execute, Anyfeeder not initialized – Adept AnyFeeder User Manual
Page 40
Chapter 3 - Using the AnyFeeder with Serial Communications
40
Adept AnyFeeder User’s Guide, Rev. B
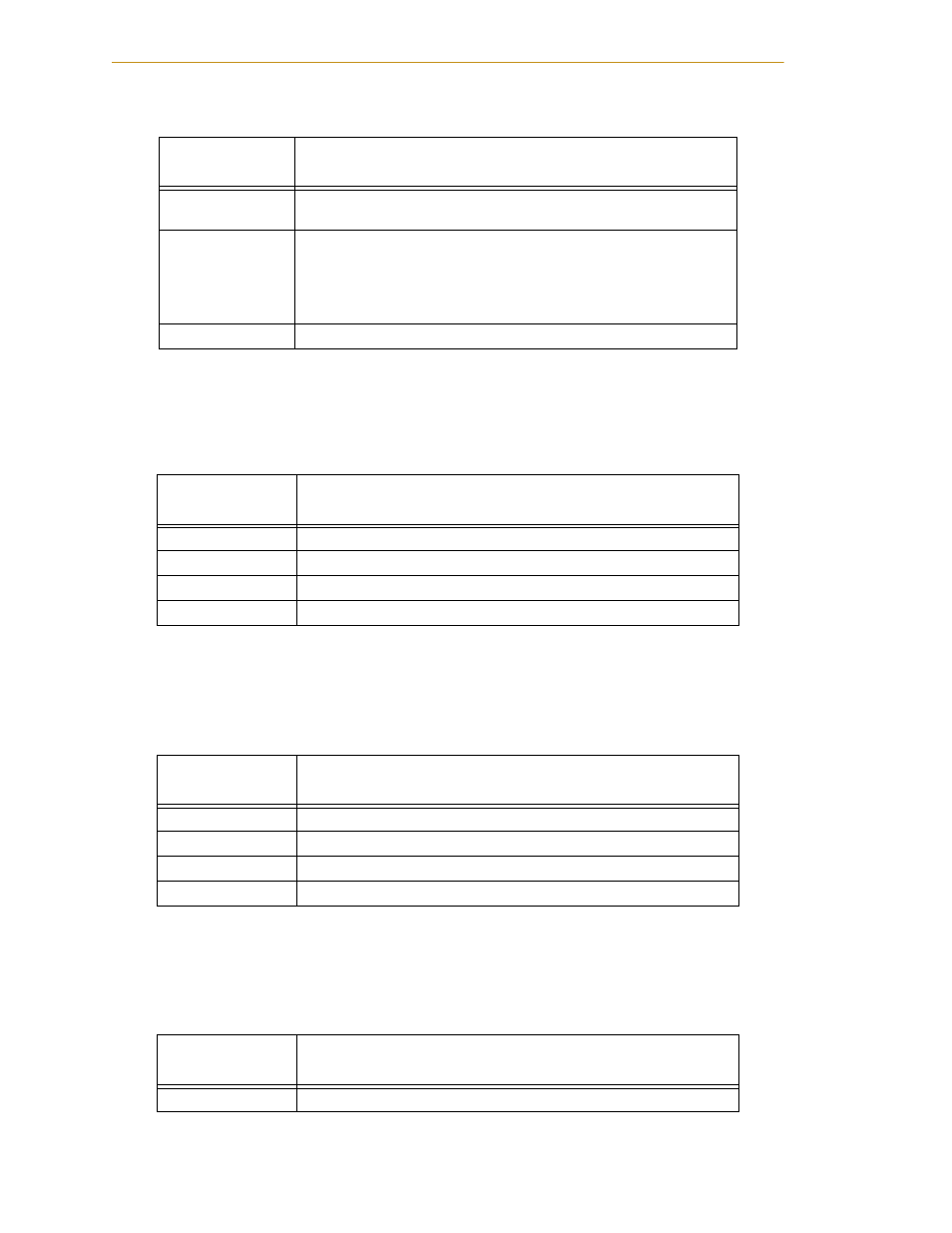
Changing the Feed Forward Repetitions and Execute
shows responses to the Feed Forward Repetitions and Execute command
(
ab[1]=10 x=1<cr>
).
Set Feed/Flip Forward Turns and Execute
shows responses to the Feed/Flip Forward Turns and Execute command
(
ab[3]=6 x=3<cr>
).
AnyFeeder not Initialized
shows responses to the
Feed Forward command before the AnyFeeder has been
initialized
(
x=1<cr>
).
m11<cr>
Motor/Drive 1 understood command and is now busy, indicated by the
second '1'
m20<cr>
Motor/Drive 2 completed action successfully, indicated by '0'; in feed
commands the 'dispense drive' does not execute a motion, but still
confirms that it accepted the command and is 'alive'. A consistent
drive reporting scheme is easier to handle by the receiving host
computer and the additional communication overhead is minimal.
m10<cr>
Motor/Drive 1 completed action successfully
Table 3-10: Changing the Flip Speed/Intensity
Terminal
Window
Explanation
m21<cr>
Drive 2 command understood
m11<cr>
Drive 1 command understood
m10<cr>
Drive 1 finished
m20<cr>
Drive 2 finished
Table 3-11: Set Feed/Flip Forward Turns and Execute
Terminal
Window
Explanation
m21<cr>
Drive 2 command understood
m11<cr>
Drive 1 command understood
m10<cr>
Drive 1 finished
m20<cr>
Drive 2 finished
Table 3-12: AnyFeeder not Initialized
Terminal
Window
Explanation
m26<cr>
Drive 2 reports that it is not initialized
Table 3-9: Feeding Parts Forward
Terminal
Window
Explanation