Yaskawa MP940 User Manual
Page 271
6.3 SVA Parameter Details
6-31
6
46
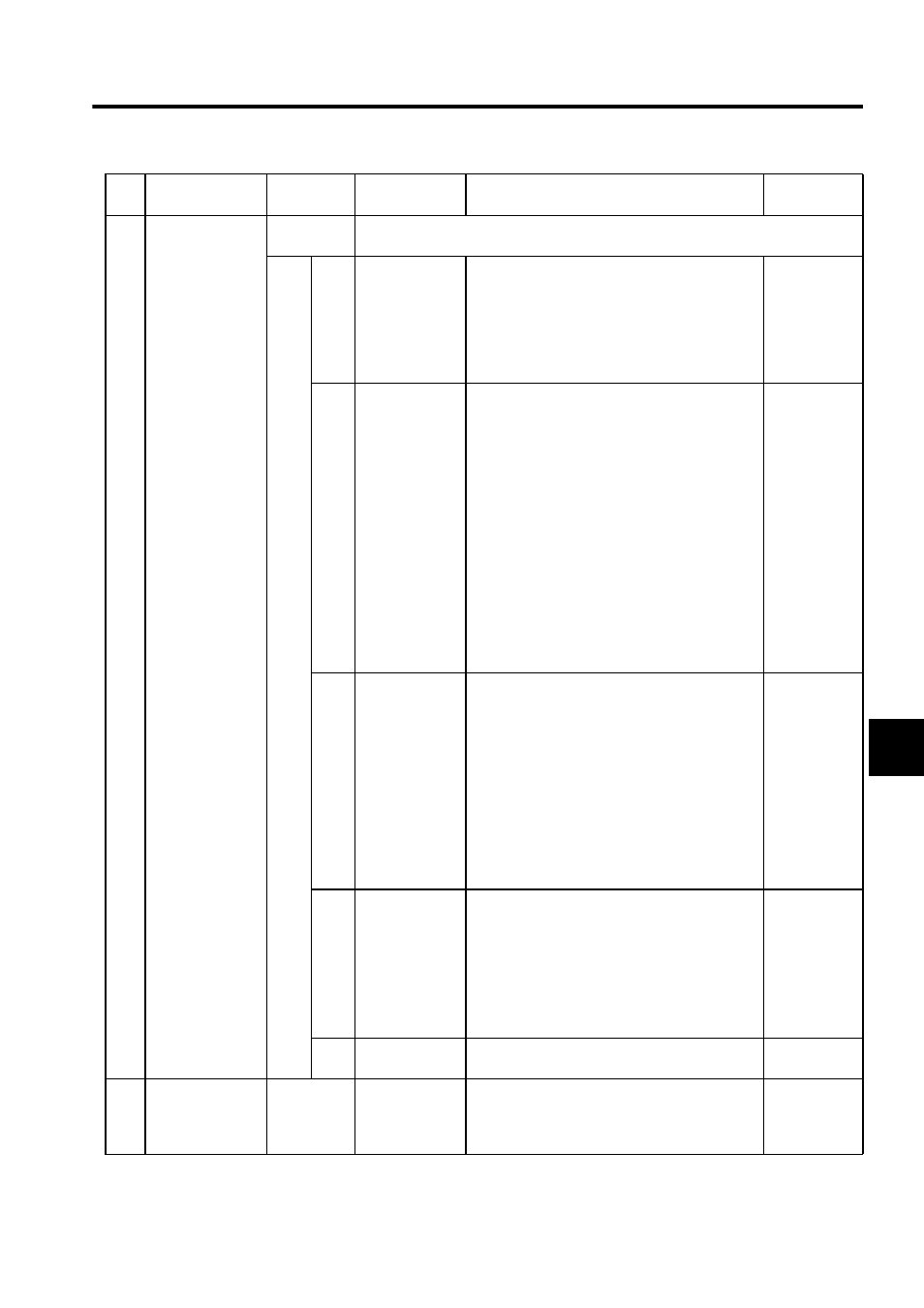
Position Control
Flags
(POSCTRL)
OWC02D
Set the functions related to position data managed by Motion Modules. The bit configu-
ration is described below.
Bit
0
Machine Lock
Mode Setting
(MLK)
The axis does not actually move, but rather
IWC002: Calculated Position in Machine Coordi-
nate System is updated in Machine Lock Mode.
This parameter is valid when IBC0152: Distribu-
tion Completed is ON if the parameter is changed
and it is used when an OWC020: Motion Com-
mand Code is used in Position Control Mode.
0
1
Request for the
Preset Number
of POSMAX
Turns
(TPRSREQ)
Request for the preset number of POSMAX turns.
With an infinite length axis, a turn is counted every
time the position value exceeds POSMAX and the
count is stored at monitor parameter ILC01E:
Number of POSMAX Turns.
The number of turns can be preset at setting
parameter OLC030: Preset Data for Number of
POSMAX Turns by turning ON the Request for
the Preset Number of POSMAX Turns Flag.
Related Parameters
• Fixed parameter 22: Maximum Value for Infinite
Length Counter
• Setting parameter OLC030: Preset Data for the
Number of POSMAX Turns
• Monitor parameter ILC01E: Number of POS-
MAX Turns
0
2
ABS System
Infinite Length
Position Control
Data Load
Request
(ABSLDREQ)
If this bit is ON when using an infinite length axis
with an absolute encoder, position data controlled
by the SVA Module will be updated with data that
is set at OLC038 and OLC03A: Encoder Position
at Shutdown and at OLC03C and OLC03E: Pulse
Position at Shutdown. This parameter is used when
an OWC020: Motion Command Code is used in
Position Control Mode.
Conditions
Absolute encoder
Fixed parameter no. 17 b5: 1, Infinite Length
Axis
0
3
Position Moni-
tor 2 (ILC034)
Unit Selection
Set the data unit to be indicated at Position
Monitor 2 (ILC034).
0: Reference unit
Indicated as 1 = 1 reference unit.
1: Pulse unit
Indicated as 1 = 1 pulse unit.
This parameter is used when an OWC020: Motion
Command Code is used in Position Control Mode.
0
4 to
15
Not used.
Set to “0.”
0
47
Workpiece
Coordinate
System Offset
(OFFSET)
OLC02E
-2
31
to 2
31
-1
Always set this parameter to “0.” It is used by the
system.
0
No.
Name
Register
Number
Bit Name
Description
Default