Details – Yaskawa MP940 User Manual
Page 410
Motion Control
11.2.2 Speed Control Mode
11-8
Details
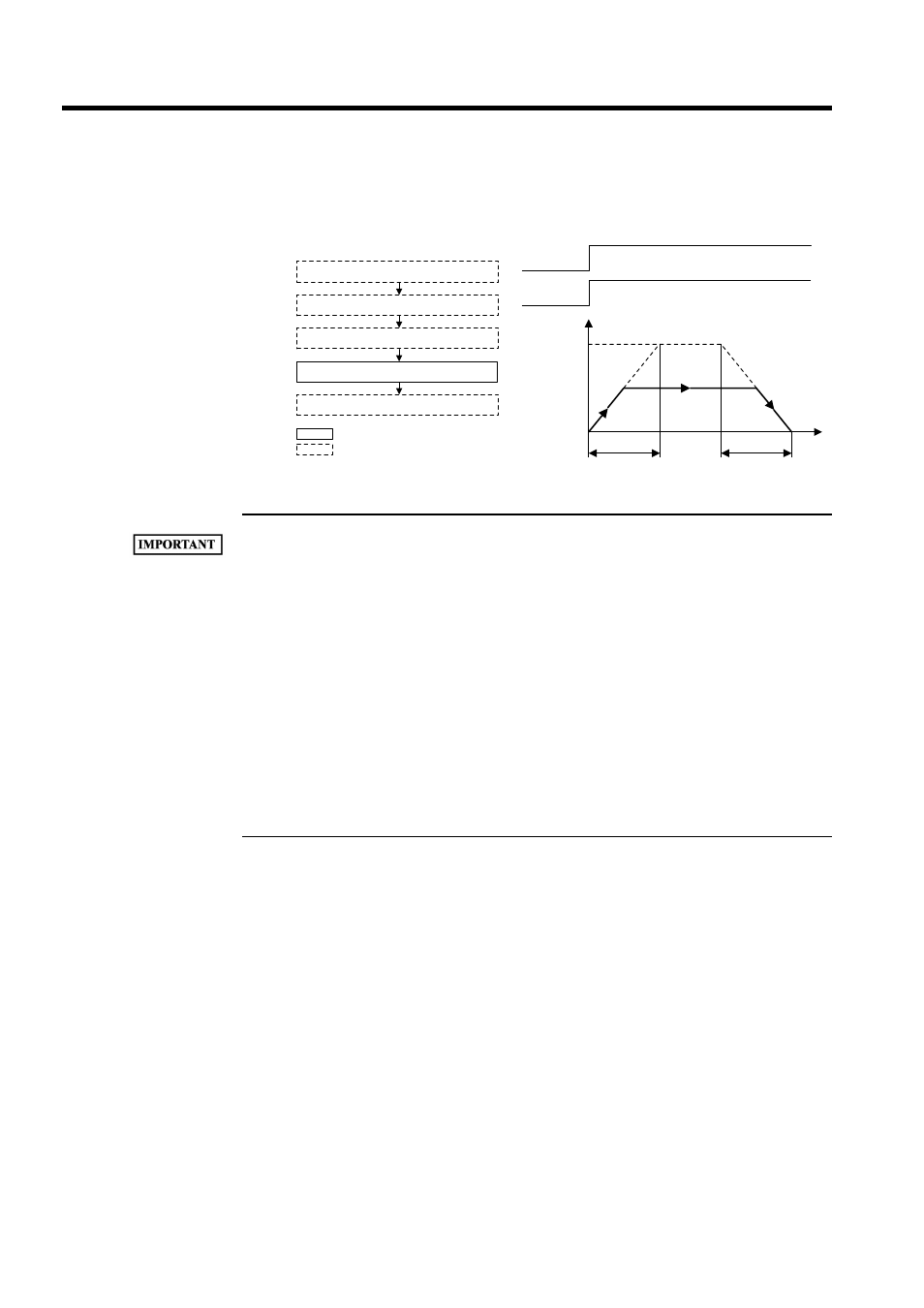
Use the following procedure to perform operation in the Speed Control Mode.
When the power is turned ON, the MP940 connected to the SERVOPACK with a bus automatically
reads SERVOPACK parameters, such as the encoder pulse and the number of feedback pulses per one
motor rotation, which used to be set in the Controller as fixed parameters.
Therefore, the following parameters are not included in the fixed motion parameters of the MP940.
• Encoder selection
• Rotation direction selection when using an absolute encoder
• Rated speed (except for the one used in the simulation mode)
• Number of feedback pulses per one motor rotation (except for the one used in the simula-
tion mode)
• Maximum speed of absolute encoder
The following parameter is fixed with the MP940.
• Pulse counting method selection: Always A/B method 4 multiplication.
1. Set the motion parameters to be used in the Speed Control Mode.
The following three methods can be used to set the setting parameters.
• Using the CP-717 Setting Parameter Screen
• Using a ladder logic program
• Using a motion program
(
100%)
0
RUN
NCON
1 Set the motion setting parameters.
2 Set the Speed Control Mode (NCON).
3 Start the Speed Control Mode operation.
Output the speed reference and torque limit
reference*.
4 Set the Speed Control Mode to OFF.
: System execution
: User settings
Speed
(%)
Speed
reference
Time
(t)
Linear acceleration
time constant
Linear deceleration
time constant
×