Adept s650HS Quattro User Manual
Page 102
Chapter 5: System Operation
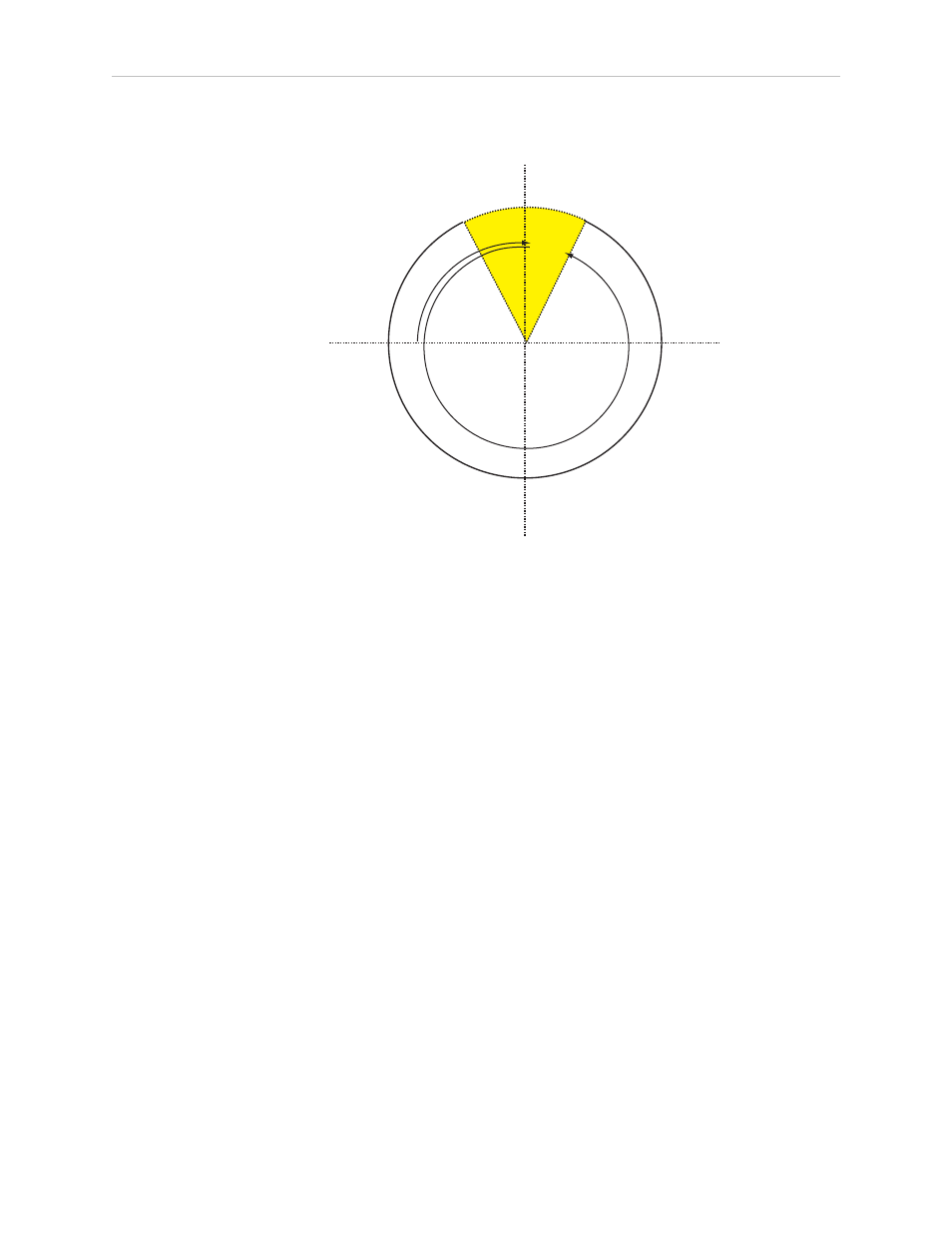
roll = -90
roll = +90
(A)
(B)
-180 +180
(B) Roll = 2 degrees
(A) Roll = -90 degrees
0
(C) Roll = 4 degrees
(C)
Figure 5-9. Motions with MULTIPLE and SINGLE Asserted
OVERLAP Program Instruction
The OVERLAP and NOOVERLAP program instructions determine the system response when
a motion requires more than 180 degrees of tool-flange rotation. When OVERLAP is set and a
robot motion requires a rotation greater than 180 degrees (in either direction), the motion is
executed without generating a program error.
With OVERLAP set, the settings of SINGLE and MULTIPLE do affect the robot motion as
described above.
NOTE: OVERLAP ALWAYS is automatically asserted every time program
execution is initiated with an EXECUTE command or instruction.
NOOVERLAP Program Instruction
When NOOVERLAP is set and a robot motion requires a rotation greater than 180 degrees (in
either direction), in order to avoid a limit stop, the motion is not executed. Instead, the
program error “*Orientation out of range*” (error code -935) is reported.
NOTE: The error can be “captured” by a REACTE routine, providing a way to
respond to the situation.
When NOOVERLAP is set, the setting of SINGLE and MULTIPLE modes has no effect on the
robot motion.
Adept Quattro User's Guide, Rev F
Page 102 of 196