Platforms – Adept s650HS Quattro User Manual
Page 17
Chapter 1: Introduction
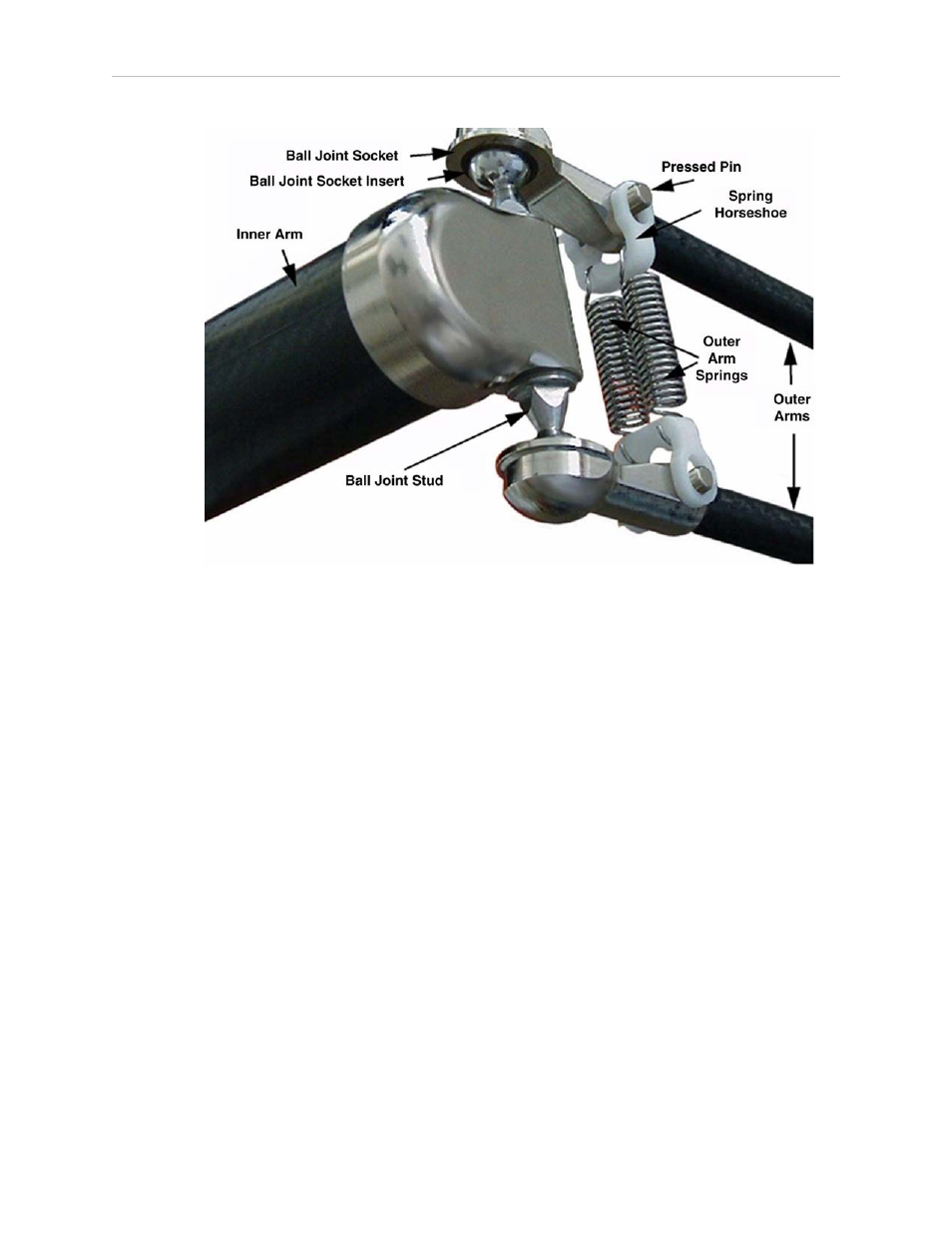
Figure 1-6. Quattro Ball Joint Assembly, Quattro HS Robot shown
Each pair of outer arms is held together with spring assemblies that pre-tension the ball joints.
The outer arms can be installed and removed without tools.
Platforms
The platform converts the motion of the four Quattro motors into Cartesian motion and, for all
but the fixed platform, Theta rotation of the robot tool.
The Adept Quattro robot currently supports four models of platforms, depending on the
amount of Theta rotation and inertia needed.
NOTE: The four models of platforms require different robot parameters.
The suffix on the part numbers that follow indicates the finish or material of the platform.
Refer to Materials and Finishes on page 19.
P31 Platform (P/N 09503-xxx)
The P31 platform has a rotation range of ±46.25°. The tool flange is machined into one of the
pivot links. It does not rotate in relation to the pivot link, so there are no gears or belts
involved. See Figure 1-7.
P30 Platform (P/N 09730-xxx)
The P30 platform is a fixed platform that provides no Theta rotation. The tool flange is
machined into the one-piece platform. See Figure 1-8.
Adept Quattro User's Guide, Rev F
Page 17 of 196