4 xslv connector, 5 robot specifications – Adept s650HS Quattro User Manual
Page 120
Chapter 7: Technical Specifications
7.4 XSLV Connector
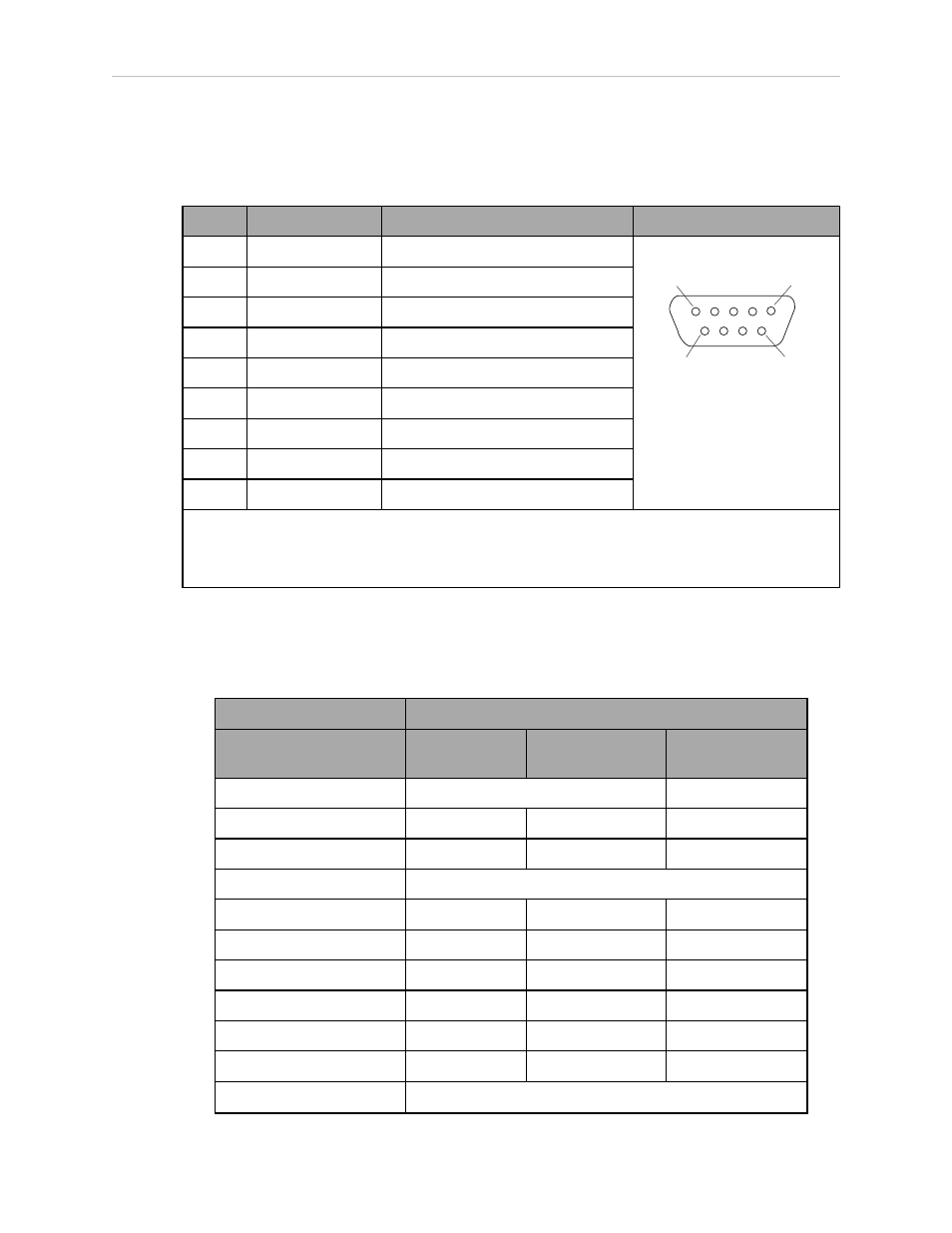
Table 7-3. XSLV Connector Pinout (AIB only)
Pin #
Description
Comment
Pin Location
1
ESTOPGND
ESTOP System Ground
Pin 1
Pin 5
Pin 6
Pin 9
XSLV1/2 Connector
2
MAN1
ESTOP Manual Input Ch 1
3
MAN2
ESTOP Manual Input Ch 2
4
HIPWRDIS
High Power Disable
5
ESTOP_RESET
Normally-Closed Check Contacts
6
AUTO1
ESTOP Auto Input Ch 1
7
AUTO2
ESTOP Auto Input Ch 2
8
N/C
9
ESTOP_SRC
ESTOP System +24 V
Mating Connector:
AMP/Tyco #747904-2, 9-pin D-Sub
AMP/Tyco #748676-1, D-Sub Cable Clamp
7.5 Robot Specifications
Specifications subject to change without notice.
Table 7-4. Robot Specifications
Description
Specification
Quattro s650
AL and EN
Quattro s650
SS
Quattro s800
Reach (cylinder radius)
650 mm (25.6 in.)
800 mm (31.5 in.)
Payload - rated
2.0 kg (4.4 lb)
1.0 kg (2.2 lb)
2.0 kg (4.4 lb)
Payload - maximum
6.0 kg (13.2 lb)
3.0 kg (6.6 lb)
4.0 kg (8.8 lb)
Adept Cycle
a
- seconds
25-305-25 mm
0.1 kg
0.3
0.39
0.33
1 kg
0.36
0.41
0.38
2 kg
0.37
0.42
0.40
3 kg
0.39
0.43
4 kg
0.41
n/a
0.45
6 kg
0.43
n/a
n/a
Packaging Cycle
a
-
25-700-25 mm
Adept Quattro User's Guide, Rev F
Page 120 of 196