Figure 11: starutil rover navigation setup – NavCom SF-2040 Rev.F User Manual
Page 51
Advertising
SF-2040 User Guide – Rev. F
4-49
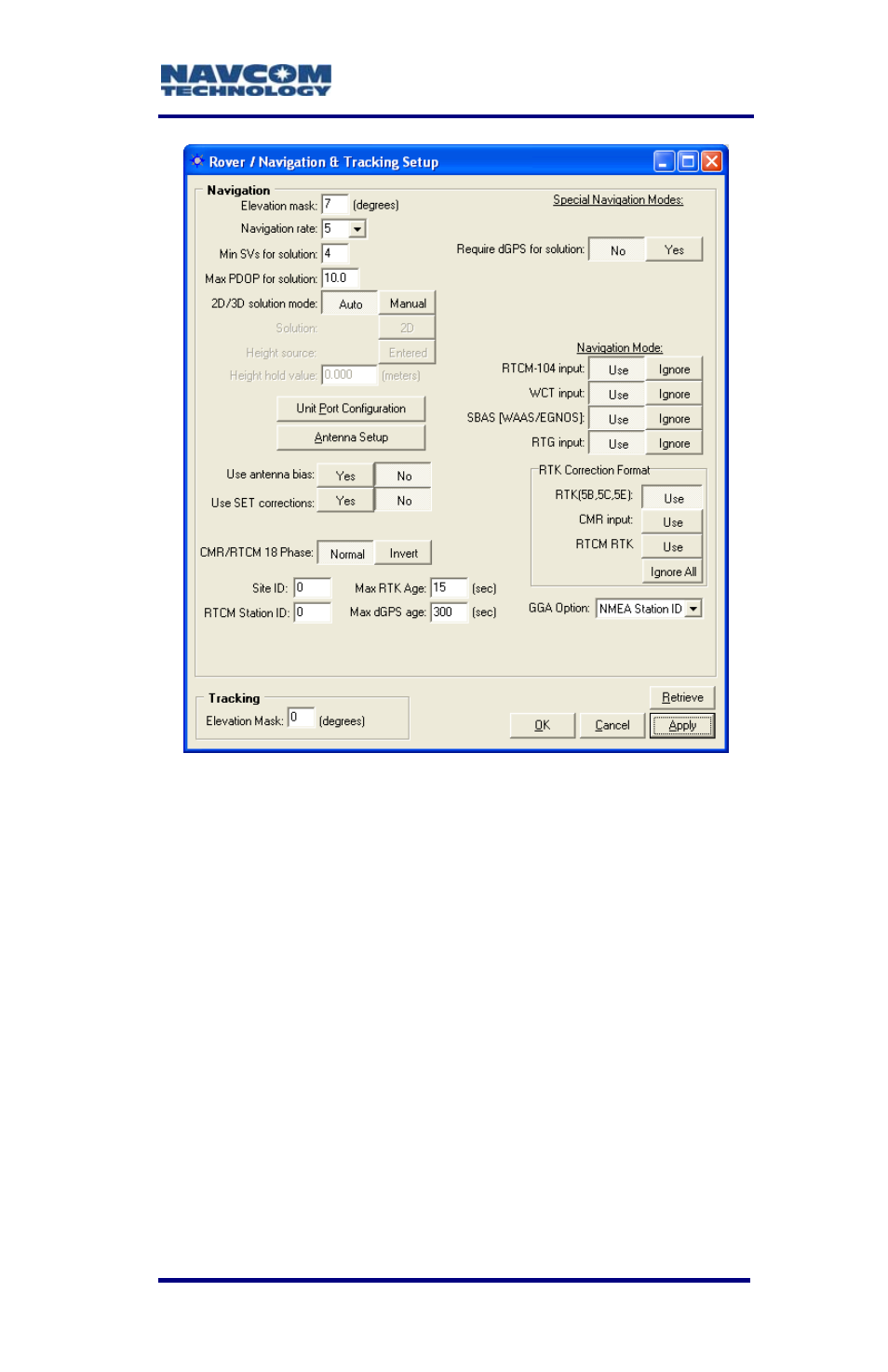
Figure 11: StarUtil Rover Navigation Setup
This port is normally used to output data to other
devices or machines that can make immediate use of
the precise positioning data available from the
SF-2040. COM1 also serves as the DGPS correction
input/output port when NCT, CMR, or RTCM RTK
correction services are in use.
COM2
9 Configuration - Control Port
9 Rate – 19.2Kbps
This port is normally used to input and output
proprietary messages used for navigation and
receiver setup. Table 10 describes the default
messages needed to best initiate surveying with
minimal effort.
Advertising
See also other documents in the category NavCom Equipment:
- SF-3050 Logging Data to Internal Memory SurvCE (4 pages)
- SF-3040 Logging Data to Internal Memory or SD Card (6 pages)
- SF-3050 Logging Data to USB Using SurvCE (4 pages)
- StarFire over IP (5 pages)
- SF-3050 Quick Start (4 pages)
- SF-3050 A Computationally Efficient Ambiguity Resolution (7 pages)
- StarFire (5 pages)
- StarFire to SW v3.0.12.0 (3 pages)
- SF-3050 Rev.I (196 pages)
- StarUtil-3000 Rev.G (177 pages)
- Sapphire Rev.L (450 pages)
- StarUtil-3000 Rev.A (119 pages)
- SF-3050 Rev.A (169 pages)
- SF-3050 Rev.B (201 pages)
- SF-3050 Rev.D (235 pages)
- Rinex Utility Rev.D (17 pages)
- SF-3040 Quick Start (4 pages)
- SF-3040 Rev.F (217 pages)
- SurveCE Integration Rev.A (150 pages)
- Install Utility Rev.C (26 pages)
- LAND-PAK Quick Start Rev.B (7 pages)
- LAND-PAK Rev.E (156 pages)
- StarUtil Rev.C (58 pages)
- LAND-PAK Rev.N (194 pages)
- StarUtil Rev.B (8 pages)
- StarUtil Rev.F (134 pages)
- SF-2040 Rev.E (63 pages)
- RT-3010 Rev.E (61 pages)
- StarFire Satellite Change Rev.G (24 pages)
- StarFire Satellite Change Rev.I (23 pages)
- TS Collecting Receiver (2 pages)
- TS Factory Default (2 pages)
- SF-2040 Rev.C (178 pages)
- LAND-PAK Rev.F (159 pages)
- RT-3020 Rev.F (93 pages)
- SF-2110 Quick Start Rev.A (2 pages)
- StarPac Rev.A (15 pages)
- StarControl Rev.C (56 pages)
- SF-2050 Rev.F (99 pages)
- TruBlu Rev.A (2 pages)
- VueStar Rev.B (13 pages)
- SF-2110 Rev.B (99 pages)
- StarUtil-2110 Rev.A (85 pages)
- RT-3010 Rev.F (89 pages)