Tool mode – Adept T2 Pendant User Manual
Page 28
Operation
28
Adept T2 Pendant User’s Guide, Rev D
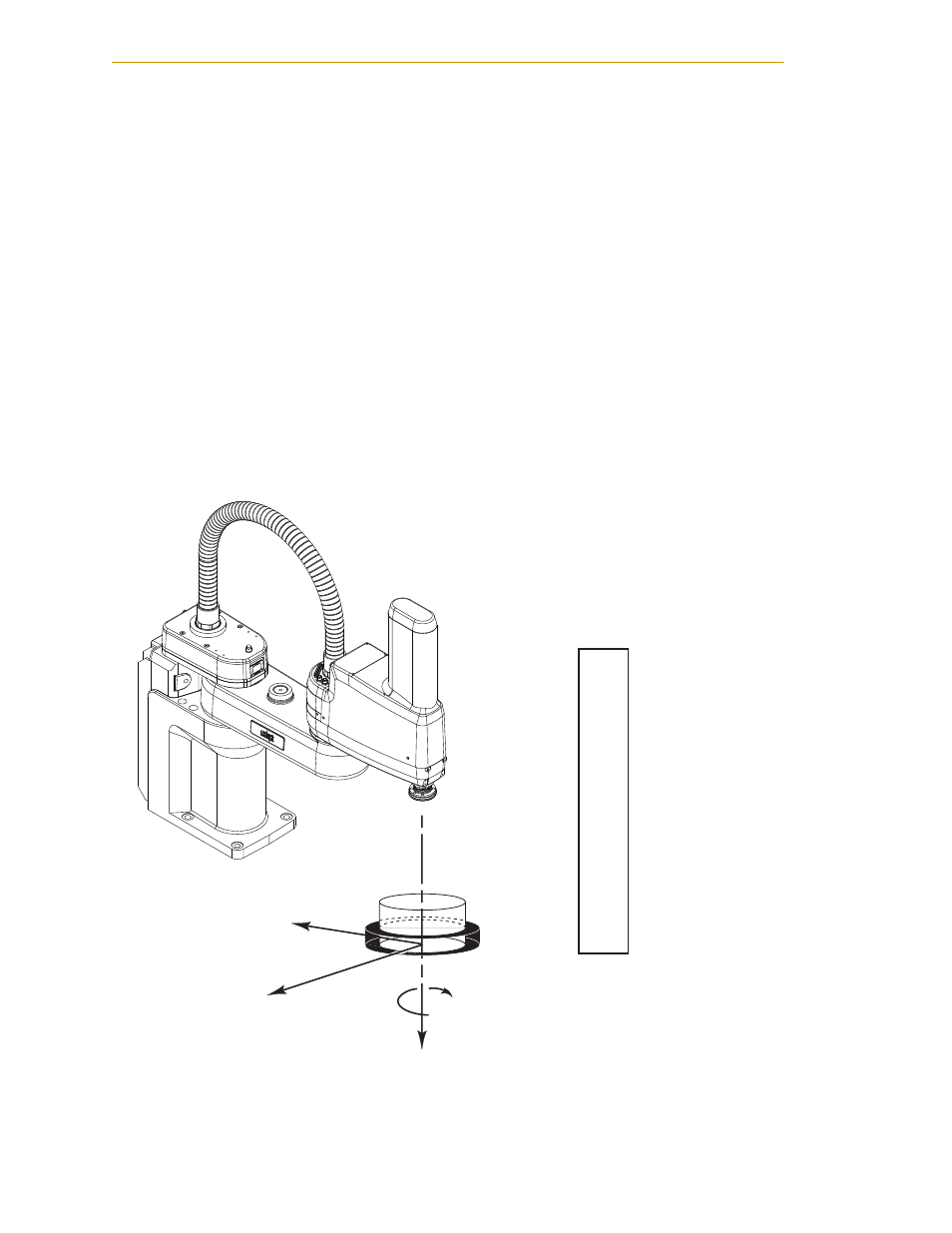
Tool Mode
When Tool mode is selected, movement in the X, Y, or Z direction is along an axis of the
Tool coordinate system. The Tool coordinate system is centered at the robot tool flange
with the Z axis pointing away from the flange. On most robots, the positive X axis is
aligned with the center of the tool flange keyway.
Select an axis of motion using the Joint/Axis control buttons - see the following figure.
Pressing the ‘+’ button moves the robot tool flange in the positive direction. Pressing the
‘–’ button moves the flange in the negative direction. In a four-axis robot, positive rotation
of the gripper (RZ) is clockwise as viewed from above.
NOTE: The following figure is drawn with the assumption that the tool
transformation is set to NULL (all values are 0). If a tool transformation is
in effect, the Tool coordinate system will be offset and rotated by the
value of the tool transformation. Any motion in Tool mode will now be
relative to the offset coordinate system, and not the center of the tool
flange. See the
V+ Language Reference Guide
for details on tool
transformations.
Figure 4-4. Tool Mode (Four-Axis SCARA)
X
Y
Z
RX
RY
RZ
X direction
Y direction
Z direction
Rotation about
Tool Z axis
+X
+Y
+RZ
+Z
T2 Pendant Joint/Axis
Control Buttons