Event driven, Polled, Synchronised – BECKHOFF FC5101 User Manual
Page 44
Eiserstraße 5 / D-33415 Verl / Telefon 05246/963-0 / Telefax 05246/963-149
44
.
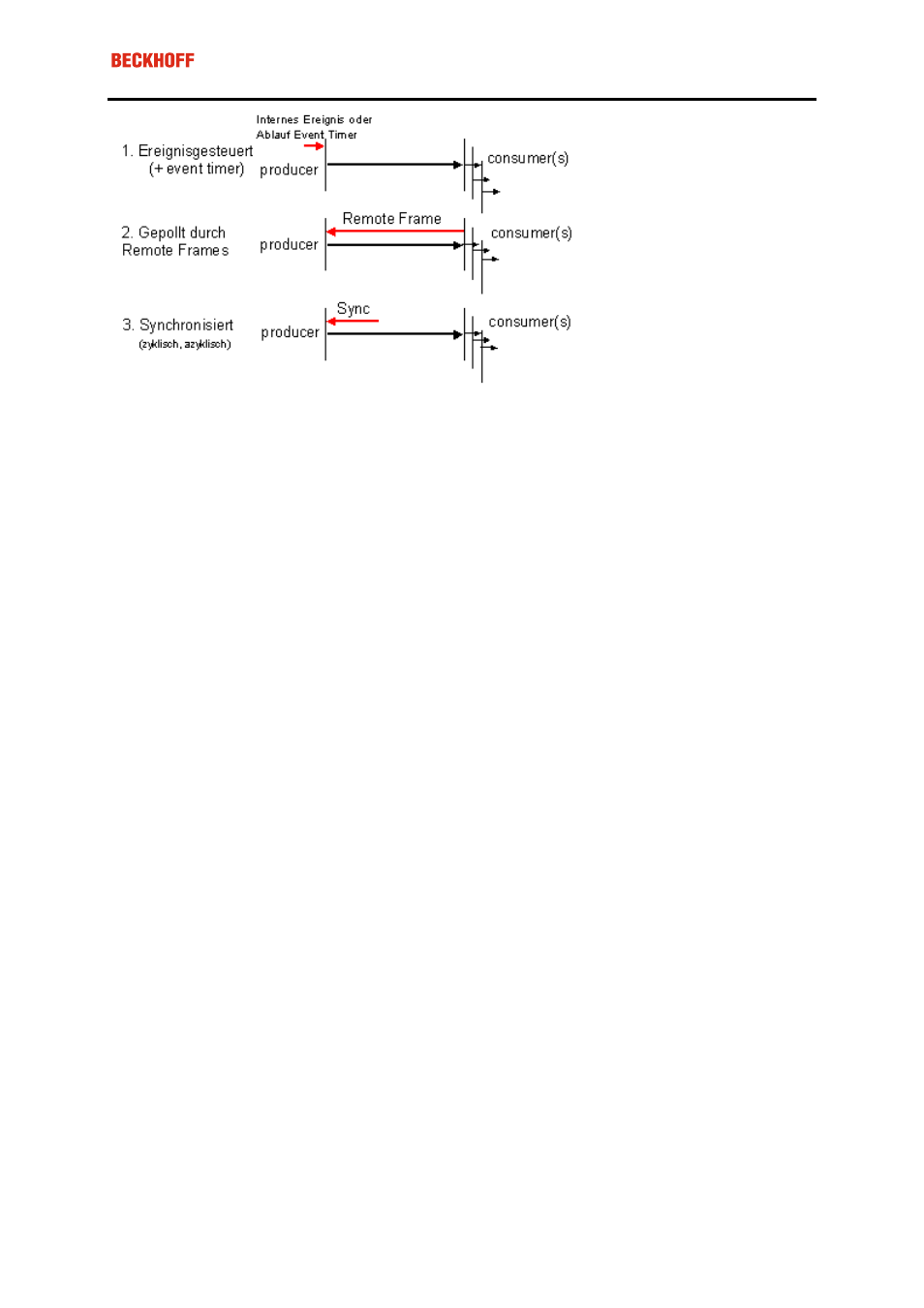
Event driven
The ”event” is the alteration of an input value, the data being transmitted immediately after this change. The
event-driven flow can make optimal use of the bus bandwidth, since instead of the whole process image it is
only the changes in it that are transmitted. A short reaction time is achieved at the same time, since when an
input value changes it is not necessary to wait for the next interrogation from a master.
As from CANopen Version 4 it is possible to combine the event driven type of communication with a cyclic up-
date. Even if an event has not just occurred, event driven TxPDOs are sent after the event timer has elapsed. If
an event does occur, the event timer is reset. For RxPDOs the event timer is used as a watchdog in order to
monitor the arrival of event driven PDOs . If a PDO does not arrive within a set period of time, the bus node
adopts the error state.
Polled
The PDOs can also be polled by data request telegrams (remote frames). In this way it is possible to get the
input process image of event-driven inputs onto the bus, even when they do not change, for instance through a
monitoring or diagnostic device brought into the network while it is running. The time behaviour of remote frame
and answer telegrams depends on what CAN controller is in use (Fig. 8). Components with full integrated mes-
sage filtering ("FullCAN") usually answer a data request telegram immediately, transmitting data that is waiting
in the appropriate transmit buffer - it is the responsibility of the application to see that the data there is continu-
ously updated. CAN controllers with simple message filtering ("BasicCAN") on the other hand pass the request
on to the application which can now compose the telegram with the latest data. This does take longer, but does
mean that the data is "fresh". Beckhoff use CAN controllers following the principle of Basic CAN.
Since this device behaviour is usually not transparent to the user, and because there are CAN controllers still in
use that do not support remote frames at all, polled communication can only with reservation be recommended
for operative running.
Synchronised
It is not only for drive applications that it is worthwhile to synchronise the determination of the input information
and the setting the outputs. For this purpose CANopen provides the SYNC object, a CAN telegram of high
priority but containing no user data, whose reception is used by the synchronised nodes as a trigger for reading
the inputs or for setting the outputs.