6 mechatrolink option unit parameters, Table 5, 6mechatrolink option unit parameters – Yaskawa 1000 Series Drive Option - MECHATROLINK-II Installation User Manual
Page 23
YASKAWA ELECTRIC
TOBP C730600 50C YASKAWA 1000-Series Option SI-T3 Installation Manual
23
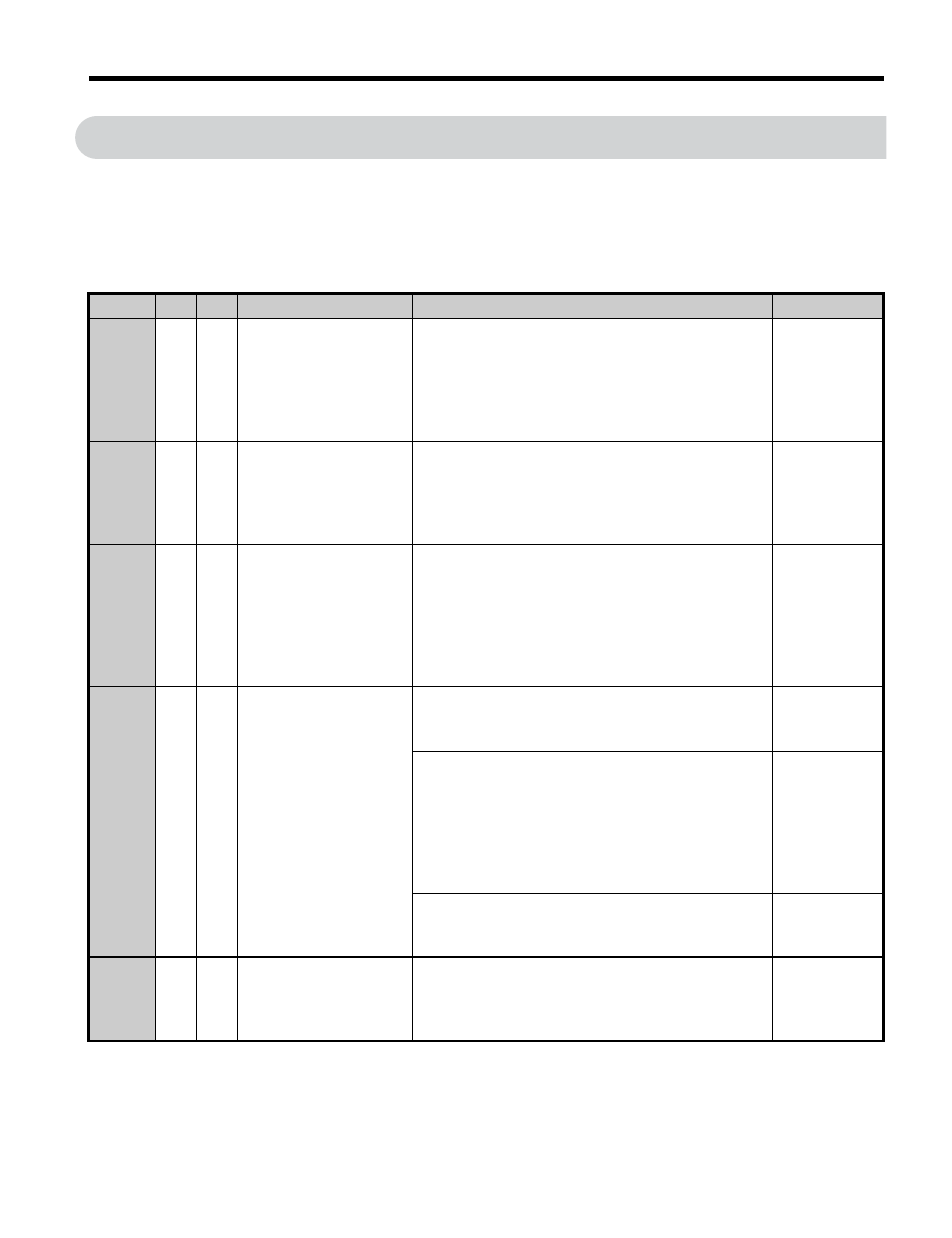
6 MECHATROLINK Option Unit Parameters
6
MECHATROLINK Option Unit Parameters
Confirm proper setting of the all parameters in
before starting network
communications.
Table 5 Parameter Settings
INV: Drive Parameter, CNV: Energy-Saving Unit Parameter
No.
INV CNV
Name
Description
Values
b1-01
{
–
Frequency Reference
Selection 1
Selects the frequency reference input source.
0: Operator - Digital preset speed d1-01 to d1-17
1: Terminals - Analog input terminal A1 or A2
2: MEMOBUS/Modbus communications
3: Option PCB
4: Pulse Input (Terminal RP)
Default: 1
Range: 0 to 4
b1-02
{
{
Run Command
Selection 1
Selects the run command input source.
0: Digital Operator - RUN and STOP keys
1: Digital input terminals S1 to S8
2: MEMOBUS/Modbus communications
3: Option PCB
Default: 1
Range: 0 to 3
b1-18
–
{
Voltage Reference
Source
Selects the voltage reference input source
0: Digital Operator - RUN and STOP keys
1: Control circuit terminals (analog input)
2: MEMOBUS/Modbus communications
3: Option PCB
7: Input voltage based control 1
8: Input voltage based control 2
Default: 8
Range:
0 to 3, 7, 8
F6-01
{
{
Communications Error
Operation Selection
Determines unit response when a bUS error is
detected during communications with the
MECHATROLINK-II Option
–
When installed to drives:
0: Ramp to stop. Decelerate to stop using the
deceleration time in C1-02.
1: Coast to stop.
2: Fast Stop. Decelerate to stop using the
deceleration time in C1-09.
3: Alarm only.
Default: 1
Range: 0 to 3
When installed to energy-saving units:
1: Stop
3: Alarm Only
Default: 1
Range: 1, 3
F6-02
{
{
External Fault from
Comm.
Option Detection
Selection
Sets the condition for external fault detection (EF0)
0: Always detected.
1: Detection during run only.
Default: 0
Range: 0, 1