Pilz PMCprimo Drive2.01/21/5/230-480V User Manual
Page 26
9 Project window
9.1.7
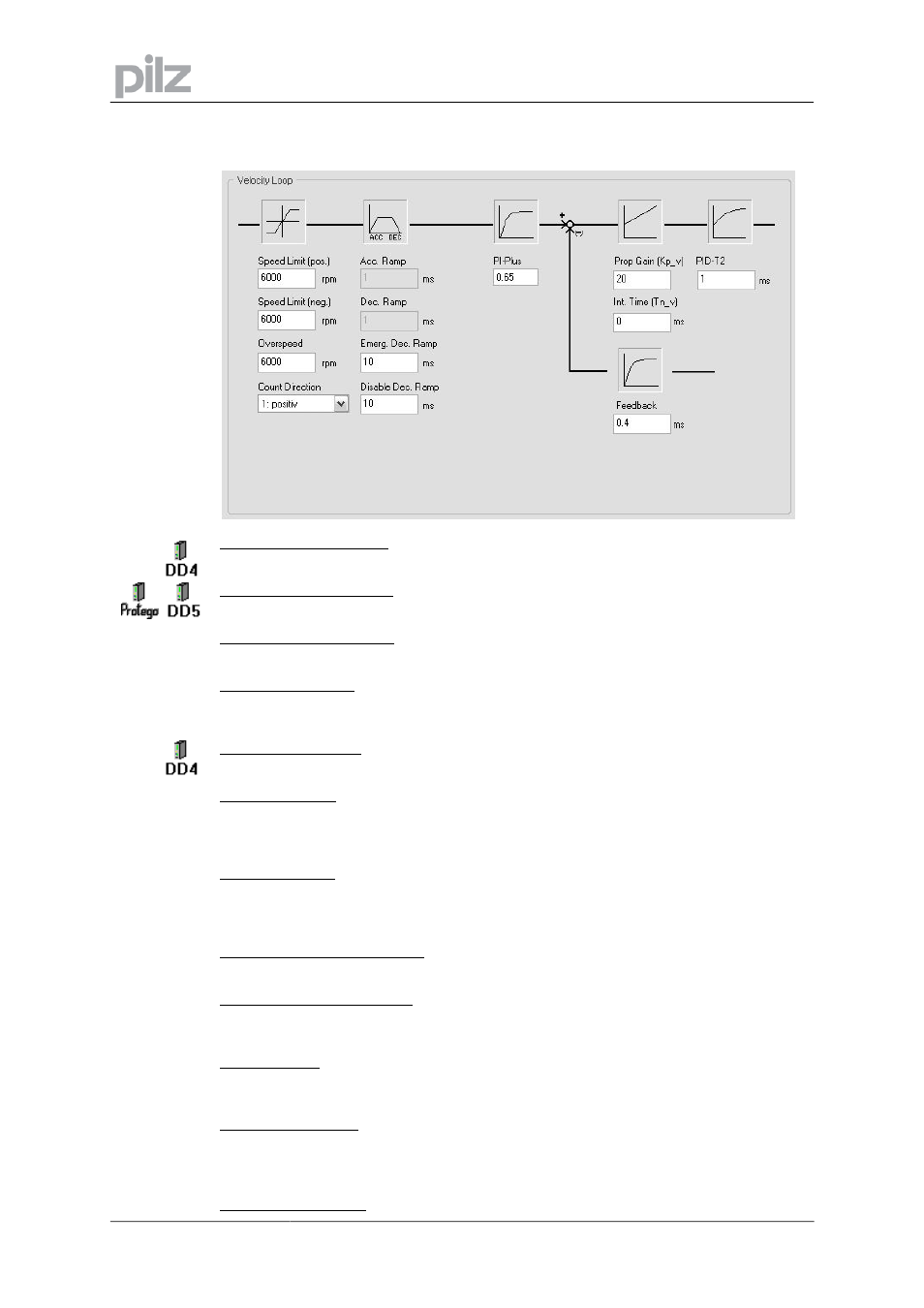
Speed controller
Speed Limit (pos.) [
VLIM
] – PMCtendo DD4 only
Limits the motor speed. The maximum value also depends on the used motor and encoder.
Speed limit (pos.) [
VLIMP
] – PMCtendo DD5 and PMCprotego D only
Limits the motor speed. The maximum value also depends on the used motor and encoder.
Speed limit (neg.) [
VLIMN
]
The VLIMN parameter defines the maximum velocity for the negative direction.
Overspeed [
VOSPD
]
Determines the upper limit for the motor speed. If this limit is exceeded, the servo amplifier
switches into the fault condition.
Count direction [
DIR
] – PMCtendo DD4 only
Fixes the direction of rotation of the motor shaft, referred to the polarity of the setpoint.
Acc. Ramp [
ACC
]
Limits the rate of increase of the internal setpoint processing during acceleration to the speed
limit (valid for both directions). A jump or step in the setpoint that is provided will be turned into
a smoother, more favourable transition.
Dec. Ramp [
DEC
]
Limits the rate of decrease of the internal setpoint processing during braking to the zero speed
(valid for both directions). A jump or step in the setpoint that is provided will be turned into a
smoother, more favourable transition.
Emerg. Dec. Ramp [
DECSTOP
]
The breaking ramp for emergency breaking.
Disable Dec. Ramp [
DECDIS
]
When the output stage is disabled (removal of the hardware or software enable), the internal
speed setpoint is set to 0, using the preset DECDIS ramp.
PI-Plus [
GVFR
]
With the default setting, the speed controller functions as a standard PI-controller with slight
overshoot in the step response.
Prop Gain Kp_v [
GV
]
Determines the proportional gain.
Int. Time Tn_v [
GVTN
]
Page 26
User Manual for Setup Software PDrive