1 setup sequence, 2 ordinary operation sequence – Yaskawa Sigma-5 User Manual: MECHATROLINK-II Commands User Manual
Page 27
2 Operation Sequence
2.3.1 Setup Sequence
2-10
2.3 Operation Sequence for Managing Parameters Using a
SERVOPACK
To manage the parameters by using SERVOPACK’s non-volatile memory, save the parameters in the non-vol-
atile memory at setup and use an ordinary operation sequence.
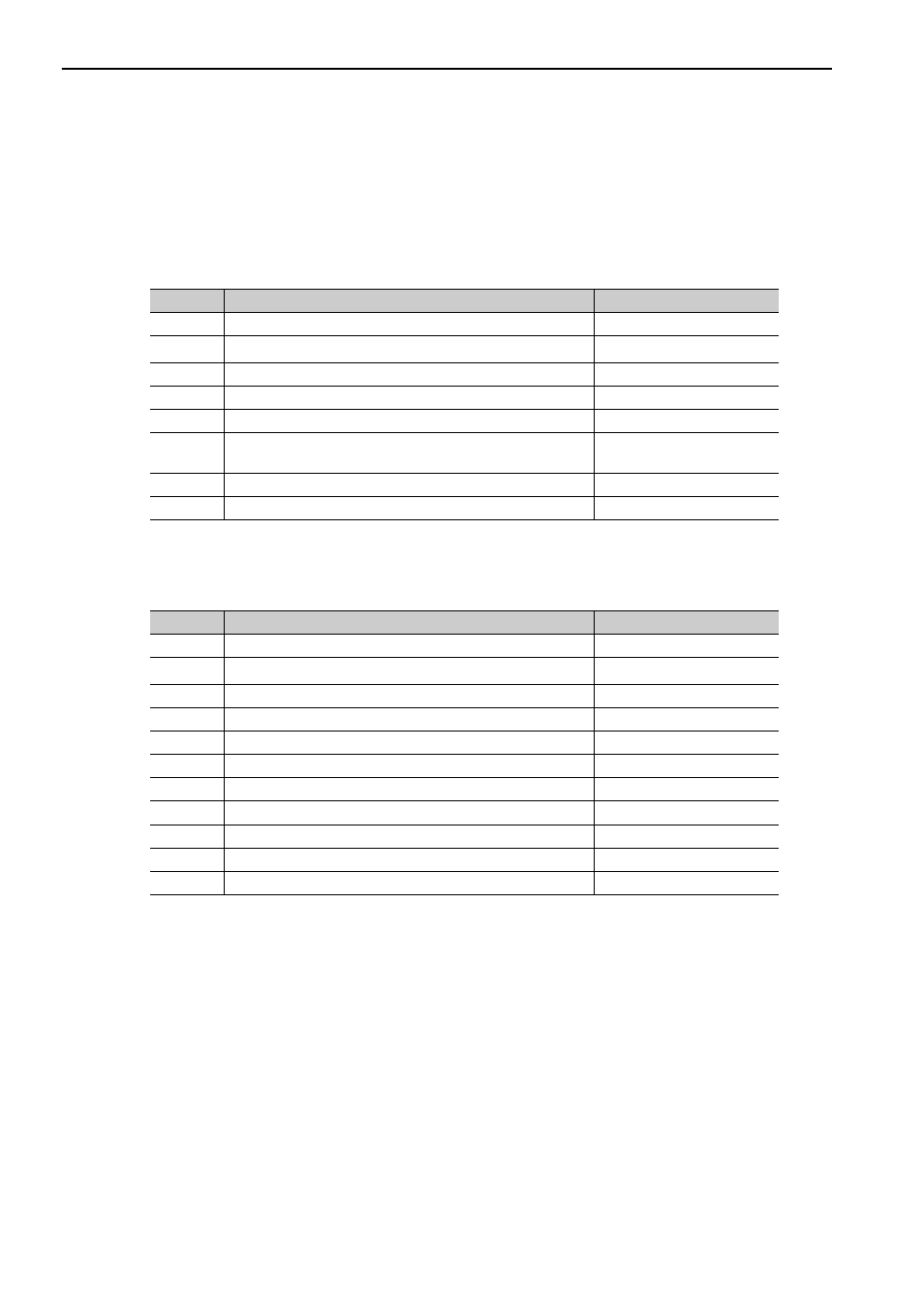
2.3.1 Setup Sequence
∗ If the connection cannot be released normally, send a DISCONNECT command for 2 or more communications cycles,
and then send a CONNECT command.
2.3.2 Ordinary Operation Sequence
∗ If the connection cannot be released normally, send a DISCONNECT command for 2 or more communications cycles,
and then send a CONNECT command.
Procedure
Operation
Command to Send
1
Turn on the control and main circuit power supply.
NOP
2
Reset the previous communications status.
DISCONNECT
*
3
Establish communications connection and start WDT count.
CONNECT
4
Check information such as device ID.
ID_RD
5
Get device setting data such as parameters.
PRM_RD, ADJ
6
Save the parameters required for device in the non-volatile
memory.
PPRM_WR
Note: Do not use PRM_WR.
7
Disconnect the communications connection.
DISCONNECT
8
Turn off the control and main circuit power supplies.
–
Procedure
Operation
Command to Send
1
Turn on the control and main circuit power supplies.
NOP
2
Reset the previous communications status.
DISCONNECT
*
3
Establish communications connection and start WDT count.
CONNECT
4
Check information such as device ID.
ID_RD
5
Get device setting data such as parameters.
PRM_RD, ADJ
6
Turn on the encoder power supply to get the position data.
SENS_ON
7
Turn the servo on.
SV_ON
8
Start operation.
POSING, INTERPOLATE, etc.
9
Turn the servo off.
SV_OFF
10
Disconnect the communications connection.
DISCONNECT
11
Turn off the control and main circuit power supplies.
–