3 establish mechatrolink, 1) connect command (0eh) – Yaskawa Sigma-5 User Manual: MECHATROLINK-II Commands User Manual
Page 38
3.2 Commands Details
3-7
3
C
o
mm
an
ds
f
or
P
reparation
P
roce
ss
3.2.3 Establish MECHATROLINK-II Connection (CONNECT: 0EH)
Send a CONNECT command to establish a MECHATROLINK-II communications connection.
When the connection is established, the WDT (watchdog timer) count starts.
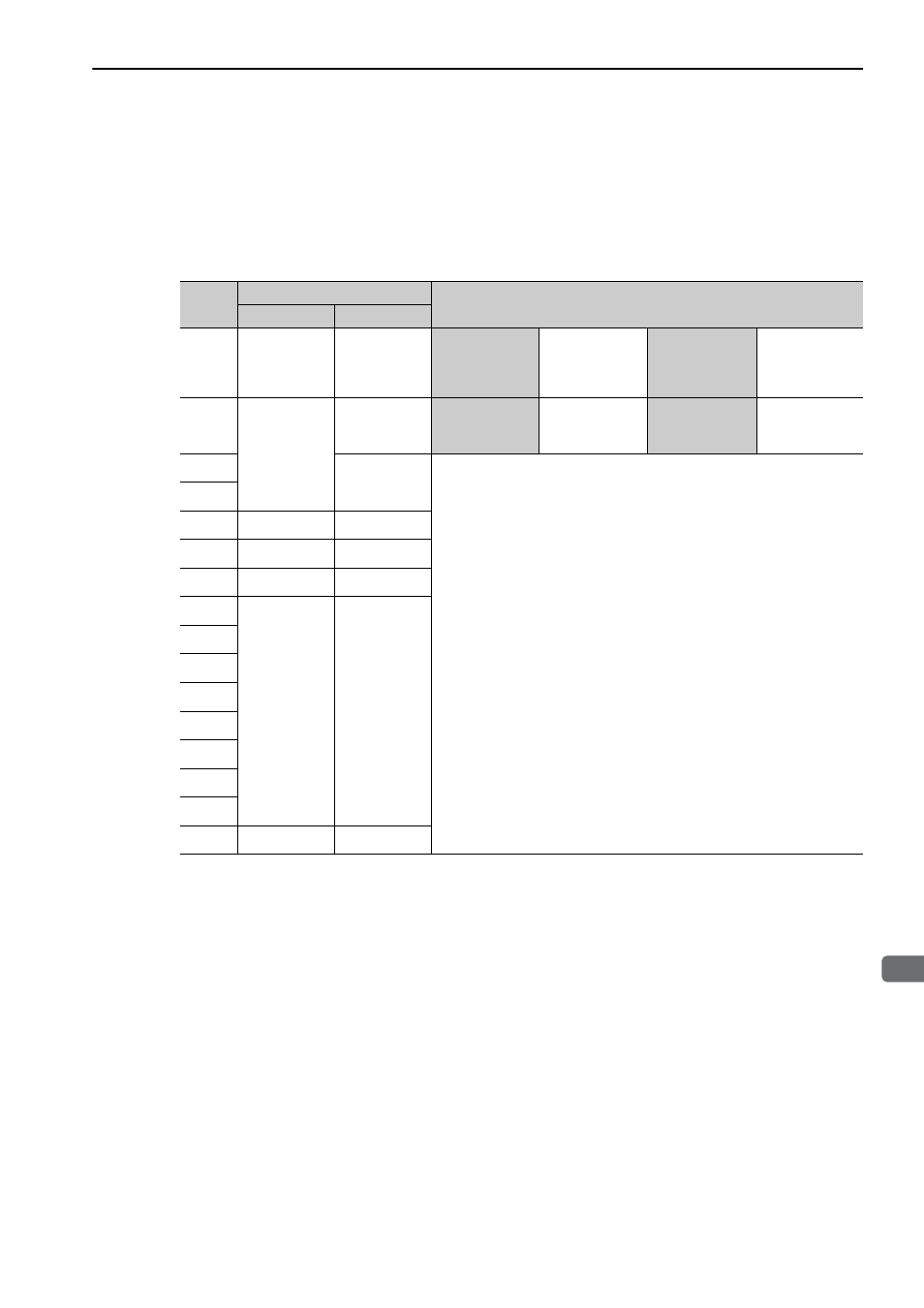
(1) CONNECT Command (0EH)
The specifications of the CONNECT command are shown below.
Note: Slave stations will not accept any MECHATROLINK-II command while a motion command such as JOG is being
executed to run the motor through SigmaWin or by digital operator.
Byte
CONNECT
Description
Command
Response
1
0EH
0EH
Phases in
which the
command can
be executed
Phase 1
Synchronization
classification
Asynchronous
command
2
ALARM
Processing
time
Communications
cycle or more
(Within 5 s)
Subcommand
Cannot be used
3
STATUS
• Establishes a MECHATROLINK-II connection and sets the communica-
tions mode according to COM_MODE.
• VER: Version. Set VER to 21H (Version 2.1)
• COM_MOD: Sets the communications mode. Refer to (2) Details of
COM_MOD for details.
• COM_TIM: Sets the communications cycle. The communications cycle
must satisfy the following equation within the range between 1 and 32.
0.25 [ms]
≤
Transmission cycle [ms]
×
COM_TIM
≤
32 [ms]
• A warning will occur and the command will be ignored in the following
cases.
- If COM_MODE is out of the setting range: Data setting warning 2
(A.94B)
- If COM_TIM is out of the settting range: Data setting warning 2
(A.94B)
- If the transmission bytes is 17 but SUBCMD = 1: Data setting warn-
ing 2 (A.94B)
- If the transmission speed is set to 10 Mbps but VER is not set to 21H:
Data setting warning 2 (A.94B)
• Slave stations will not accept commands other than CONNECT, DIS-
CONNECT, and NOP before the connection is established. If a command
other than CONNECT, DISCONNECT, and NOP is sent before the con-
nection is established, NOP is always returned as the response.
4
5
VER
VER
6
COM_MOD
COM_MOD
7
COM_TIM
COM_TIM
8
9
10
11
12
13
14
15
16
WDT
RWDT