2 command related parameters details, 1 electronic gear setting, 1) electronic gear – Yaskawa Sigma-5 User Manual: MECHATROLINK-II Commands User Manual
Page 93: 2 command related parameters details -4, 1 electronic gear setting -4, 1) electronic gear -4
5 Command Related Parameters
5.2.1 Electronic Gear Setting
5-4
5.2 Command Related Parameters Details
5.2.1 Electronic Gear Setting
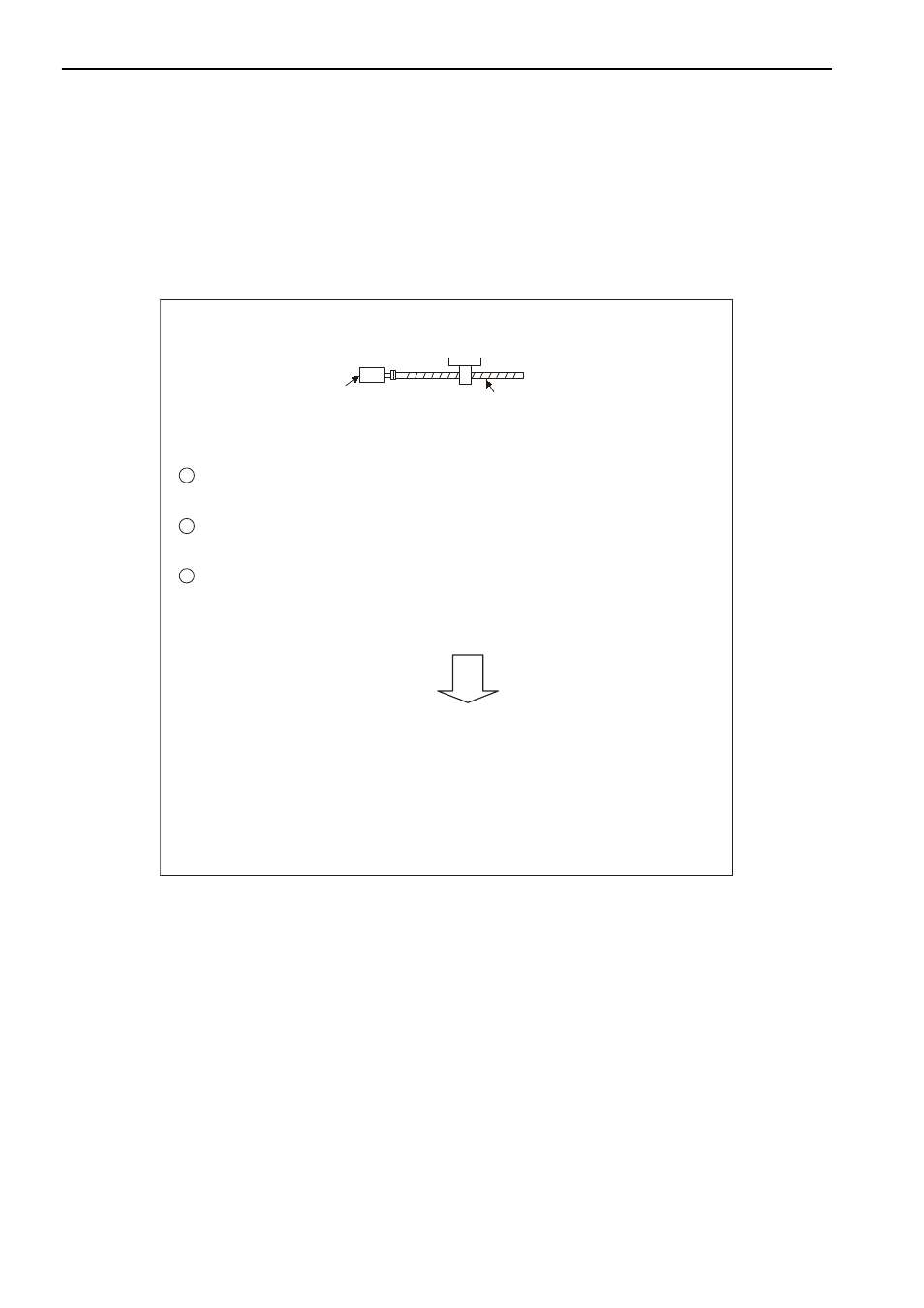
(1) Electronic Gear
The electronic gear enables the workpiece travel distance per input reference pulse from the host controller to
be set to any value. The minimum position data moving a load is called a reference unit.
To move a workpiece 10 mm:
When the Electronic Gear is Not Used:
Calculate the revolutions.
1 revolution is 6 mm. Therefore, 10 ÷ 6 = 1.666667 revolutions.
Calculate the required reference pulses.
1048576 pulses is 1 revolution. Therefore, 1.666667 × 1048576 = 1747627.01 pulses.
Input 1747627 pulses as reference pulses.
Reference pulses must be calculated per reference. → complicated
When the Electronic Gear is Used:
The reference unit is 1 μm. Therefore, to move the workpiece 10 mm (10000μm),
1 pulse = 1μm, so 10000 ÷ 1 = 10000 pulses.
Input 10000 pulses as reference pulses.
Calculation of reference pulses per reference is not required. → simplified
Ball screw pitch: 6 mm
Workpiece
Encoder resolution (20 bit) 1048576
1
2
3