8 external input positioning (ex_posing: 39h), 8 external input positioning (ex_posing: 39h) -17, 1) ex_posing command (39h) – Yaskawa Sigma-5 User Manual: MECHATROLINK-II Commands User Manual
Page 82
4.2 Motion Commands Details
4-17
4
Motion Commands for Operation
4.2.8 External Input Positioning (EX_POSING: 39H)
(1) EX_POSING Command (39H)
The EX_POSING command is used to start positioning to the target position (TPOS) at the target speed
(TSPD). When a latch signal is input midway, positioning is performed according to the final travel distance
for external positioning from the latch signal input position. When no latch signal is input, positioning is per-
formed for the target position (TPOS).
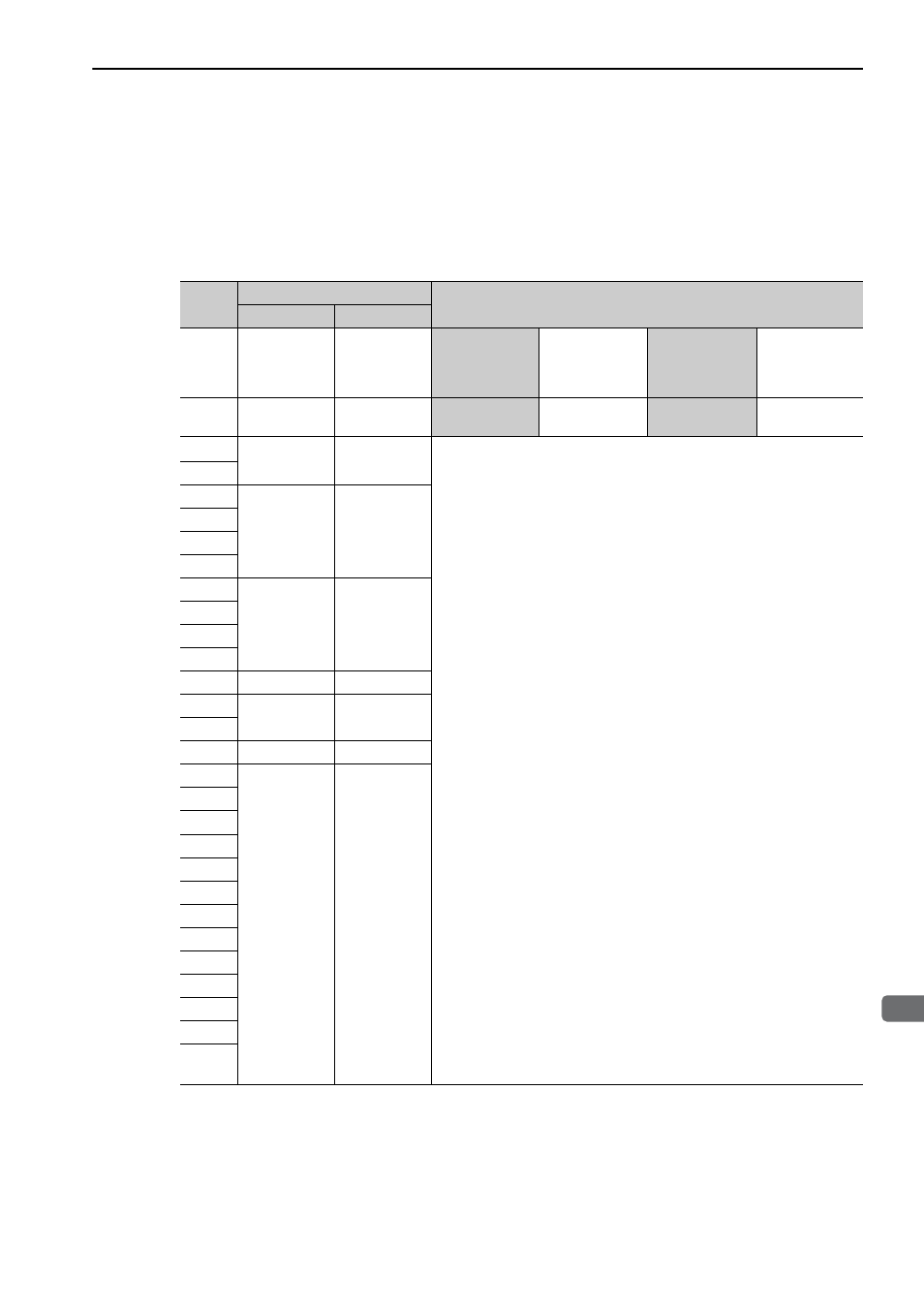
Byte
EX_POSING
Description
Command
Response
1
39H
39H
Phases in
which the
command can
be executed
Phase 2 and 3
Synchronization
classification
Asynchronous
command
2
LT_SGNL
ALARM
Processing
time
Within commu-
nications cycle
Subcommand
Can be used
3
OPTION
STATUS
• Use LT_SGNL to select the latch signal.
For details on LT_SGNL, refer to 7.1.6 LT_SGNL Specifications.
When the latch signal is input, positioning is performed according to the
final travel distance for external positioning specified in Pn814 from the
latch signal input position. And, the latch signal input position is stored in
the feedback latch position (LPOS) and is forcibly output to MONITOR2
for one communications cycle.
When no latch signal is input, positioning is performed for the specified
target position (TPOS).
• OPTION field can be used.
• The target position (TPOS) is a signed 4-byte data, and the absolute posi-
tion in reference coordinate system.
Set the target position (TPOS) so that the travel distance (TPOS - IPOS)
is a value of 31 bits (24...) or less.
• The target speed (TSPD) is an unsigned 4-byte data.
Set a value in the range between 0 and the motor max. speed [reference
unit/s].
• The target position and target speed can be changed during positioning
executed by this command.
However, any change in the target position and/or target speed after the
latch signal input will be invalid.
• The torque (force) limit (TLIM) can be used by setting Pn81F and Pn002.
- TLIM setting range: 0 to 4000H [maximum motor torque (force)/
4000H]
If a value between 4000H and FFFFH is set, the maximum motor
torque (force) will be applied as the limit.
Use the ADJ command to obtain the maximum motor torque (force).
• Use DEN (output complete) to confirm the completion of position refer-
ence output.
• When the command in execution is switched from this command to
another command, latching will be cancelled and positioning will be per-
formed for the specified target position (TPOS).
• A warning will occur and the command will not be executed in the fol-
lowing cases.
- This command is used when the servo is OFF: Command warning 1
(A.95A)
- The target speed (TSPD) exceeds the limit: Data setting warning 2
(A.94B)
- When using SigmaWin or a digital operator for motor operations such
as JOG: Command warning 1 (A.95A)
4
5
TPOS
MONITOR1
6
7
8
9
TSPD
MONITOR2
10
11
12
13
SEL_MON1/2 SEL_MON1/2
14
TLIM
IO_MON
15
16
WDT
RWDT
17
Subcommand
area
Subcommand
area
18
19
20
21
22
23
24
25
26
27
28
29