Adept anyfeeder responses, Responses – Adept AnyFeeder User Manual
Page 37
Serial Command Codes
Adept AnyFeeder User’s Guide, Rev. B
37
Adept AnyFeeder Responses
After receiving a command, the Adept AnyFeeder will respond with specific characters to
indicate the status of each motor in the mechanism.
Motor 1: The “flip” drive, located to the front of the AnyFeeder, under the feed surface
Motor 2: The “dispense” drive, located to the rear of the AnyFeeder, under the bulk
container
Responses
mix
Where:
i = the drive number (1 or 2) that is reporting
x = the status of the drive
Set digital output
Set the state of the
AnyFeeder's
internal digital
outputs. It is not
recommended to
set these during
normal operation,
only for debugging
purposes.
> ab[27]=[mode]_x=27<cr>
Mode:
0: Engage the
dispense clutch
1: Engage the flip
clutch
2:Turn backlight OFF
3:Turn backlight ON
4: Move retainer gate
UP
5: Move retainer gate
DOWN
Standard
response
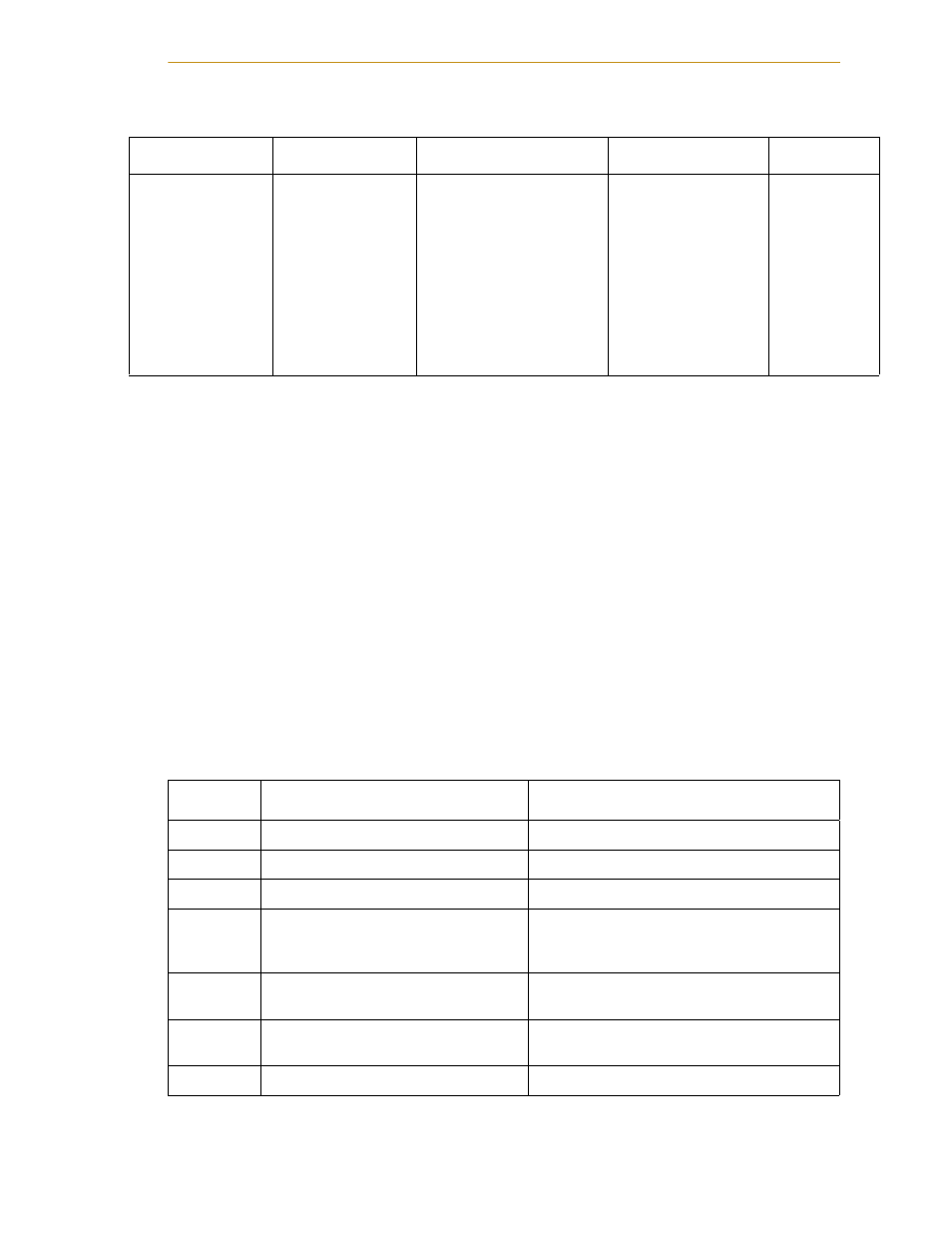
Table 3-5: AnyFeeder Responses
Response
Meaning
Details
m10
Motor 1 completed action successfully
m11
Motor 1 received command and is busy
m12
Invalid command
Command or command syntax incorrect
m13
Motor 1 servo error
Possibly overloaded. Check for obstructions or
hardware problems. Error must be reset before
operation can continue.
m16
Motor 1 not initialized
AnyFeeder must be initialized before
commands can be sent
m17
Motor 1 error state
Motor 1 reporting an error. Error must be reset
before operation can continue.
m20
Motor 2 completed action successfully
Table 3-4: Setting Parameters
Command
Description
Syntax
Explanation
Response